
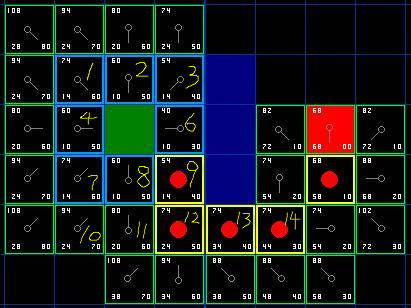
公式表示为:f(n)=g(n)+h(n),其中f(n)是经过节点n从初始点到目标点的代价函数,g(n)表示从初始节点到节点n的代价,h(n)表示从节点n到目标点的启发式代价
- Dijkstra是无目的的扩展,A星是启发式,选择离目标点最近的方向扩展,但不一定是最短路径。
- Dijkstra算法的实质是广度优先搜索,是一种发散式的搜索,所以空间复杂度和时间复杂度都比较高。
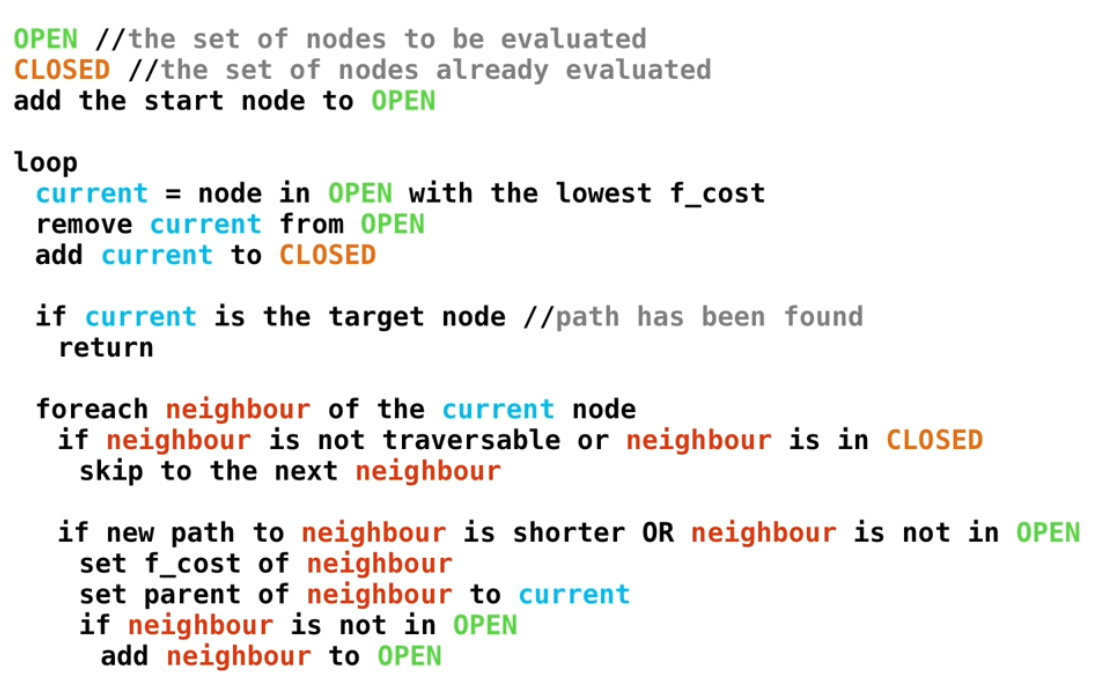
- 对路径上的当前点,
A*算法不但记录其到源点的代价,还计算当前点到目标点的期望代价,是一种启发式算法,也可以认为是一种深度优先的算法。