<nodepkg="octomap_server"type="octomap_server_node"name="octomap_server"> <!-- resolution in meters per pixel --> <paramname="resolution"value="0.05"/> <!-- name of the fixed frame, needs to be "/map" for SLAM --> <paramname="frame_id"type="string"value="$(arg frame_id)"/> <paramname="sensor_model/max_range"value="150.0"/> <paramname="latch"value="true"/> <!-- 需要和 publish_pointcloud 的frame_id相同,否则会导致Octomap没有发布数据 --> <!-- topic from where pointcloud2 messages are subscribed,改为自己的点云话题 --> <remapfrom="/cloud_in"to="$(arg cloud_topic)"/> <remapfrom="/projected_map"to="$(arg map_topic)"/> </node>
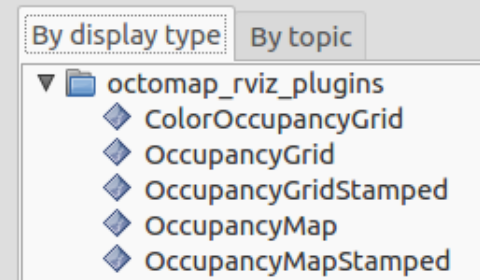
octomap topics are 3D occupancy maps, which would be used by some other 3D planning approach (e.g., move_it). They are not the same as /grid_map or /proj_map from rtabmap_ros. For 3D trajectories (having to move in Z, e.g., quadcopter), then using OctoMap with OMPL/move_it can be another approach, though not sure if there is one most popular approach for the 3D case.
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update' [WARN] wait_for_service(/rqt_gui_py_node_26204/tf2_frames): failed to contact, will keep trying
ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down
sudo bash -c "echo blacklist nouveau > /etc/modprobe.d/blacklist-nvidia-nouveau.conf" sudo bash -c "echo options nouveau modeset=0 >> /etc/modprobe.d/blacklist-nvidia-nouveau.conf"
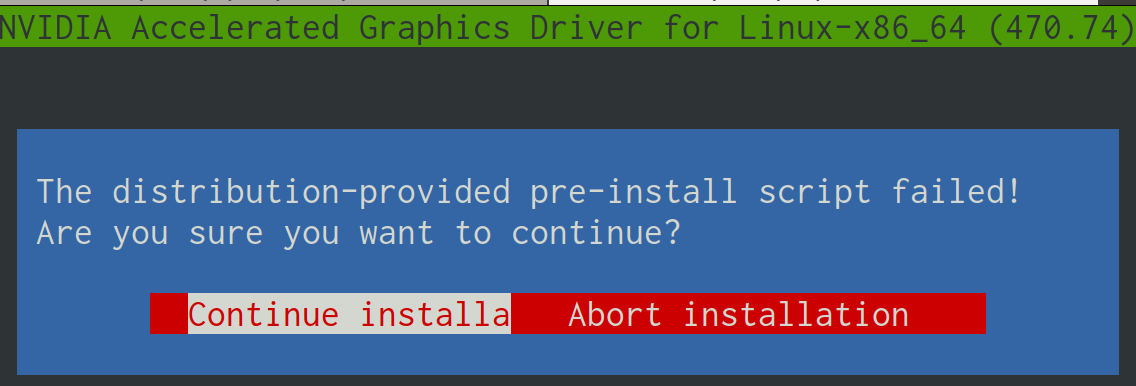
重启一下系统,运行之前下载的驱动。可能会出现下面的信息:
1 2 3
The distribution-provided pre-install script failed! Are you sure you want to continue? -> CONTINUE INSTALLATION Would you like to run the nvidia-xconfig utility? -> YES
安装完成后重启系统就可以点击软件列表中的 NVIDIA 的配置软件配置显卡驱动了,如果你遇到
1
WARNING: Unable to find suitable destination to install 32-bit compatibility libraries