
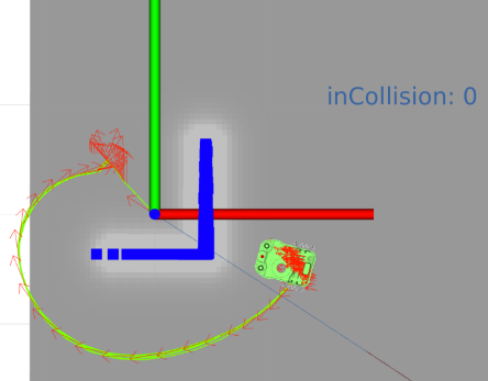
无论传感器是雷达还是相机,都只能看到障碍物的一部分。如果障碍物比较大,而目标点在障碍物内(我们知道,机器人不知道),机器人会绕过它看到的障碍部分,前往目标点,然后它又看到障碍,于是接着绕行,这样会绕很久。目前只能设置参数planner_patience,绕的时间太长时,进行Abort
向move_base发布目标的频率太高,会出错
写一个loop程序,高频率循环发两个目标点,连C++程序都不用,写bash脚本即可1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
# 每隔1秒就发布下一个目标点
while true; do
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: 'map'
pose:
position:
x: 20
y: 7
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 1
w: 0" & sleep 1 && kill -2 $!
# -2 是用信号量表示的 $!是子进程号 相当于执行ctrl+C
rostopic pub /move_base_simple/goal geometry_msgs/PoseStamped "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: 'map'
pose:
position:
x: 24
y: 7
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0
w: 1" & sleep 1 && kill -2 $!
sleep 1
echo " ---------- start next loop ---------- "
donesleep 1 && kill -2 $!是关键,sleep 1秒就杀死进程。 如果没有这句,机器人执行第一次导航时,必须等待Ctrl+C才能进入下一次导航
经过测试,向move_base发布目标点的频率如果太高,会报错,最快为0.6秒一次。 但是关掉rviz后,可达到0.5秒一次,可见优化程序会有效。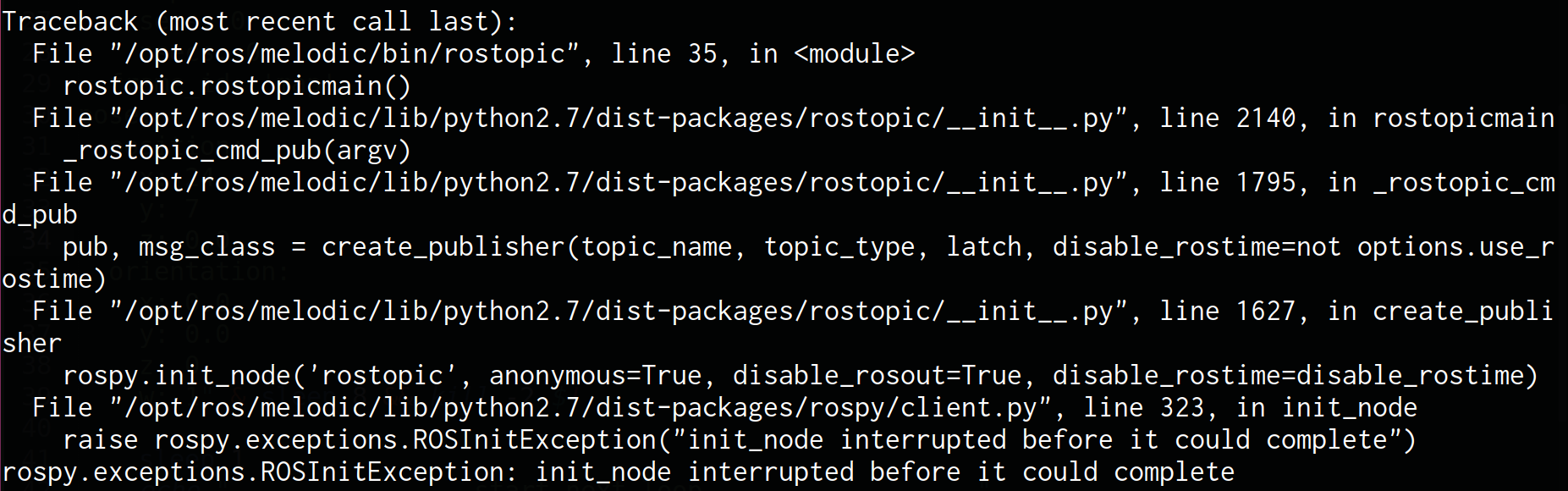
init.py的2140行
rospy client.py 251行
这里就涉及ROS源码了,想彻底优化就得着手ROS源码了,但是感觉没有必要。