
测试的要求: 不能把地面加入costmap,但是稍高于地面的物体能加入。
不断调整 max_obstacle_height, min_obstacle_height, obstacle_range, raytrace_range 四个参数,但是costmap发现生成的障碍总是清除不掉。
换了另一个相机和雷达,发现没有这个问题. 后来发现有时甚至不能生成障碍了。
清除障碍的函数重点是ObservationBuffer::purgeStaleObservations()其中的 observation_list_,它又来自bufferCloud函数中的observation_cloud,后者又来自 global_frame_cloud。
相机发布的点云是在相机坐标系,在bufferCloud函数里用pcl_ros::transformPointCloud转换到代价地图的全局坐标系(也就是yaml中指定的global_frame,一般关注的是local costmap。) 得到 global_frame_cloud。然后按如下条件筛选出 observation_cloud1
2
3
4
5
6
7
8for (unsigned int i = 0; i < cloud_size; ++i)
{
if (global_frame_cloud.points[i].z <= max_obstacle_height_
&& global_frame_cloud.points[i].z >= min_obstacle_height_)
{
observation_cloud.points[point_count++] = global_frame_cloud.points[i];
}
}
因此 min_obstacle_height 和 max_obstacle_height是在代价地图全局坐标系下的值。
在bufferCloud函数中加入代码,把observation_cloud发布出来1
2
3sensor_msgs::PointCloud2 observation_ros_cloud;
pcl::toROSMsg(observation_cloud, observation_ros_cloud);
observation_cloud_pub.publish( observation_ros_cloud );
在构造函数里加入1
2
3ros::NodeHandle n;
n.param("publish_observation_cloud", pub_observation_cloud_, false );
observation_cloud_pub = n.advertise < sensor_msgs::PointCloud2 > ("observation_cloud", 2);
这样可以观察最终生成的障碍来自什么样的点云。比如下面两个点云的对比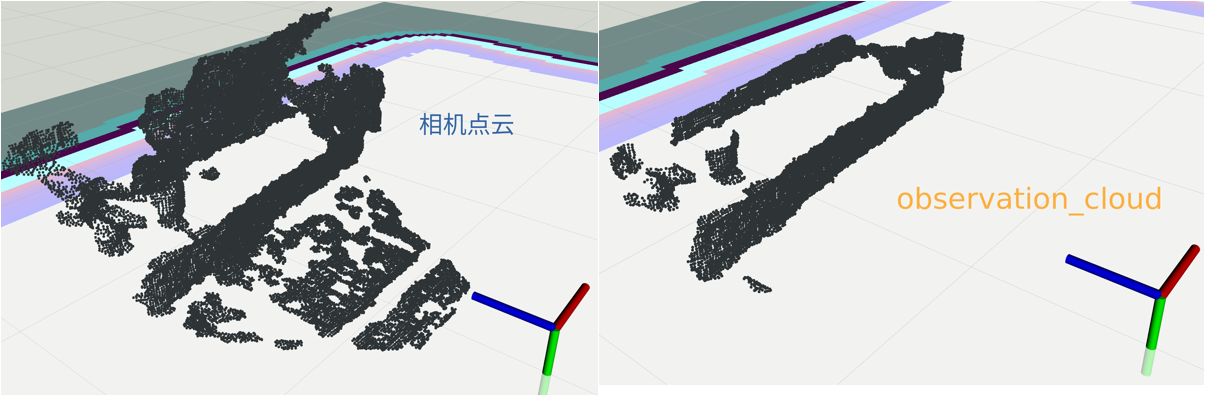
最后查啊查啊,终于发现和其他相机的区别不在参数,而在于我之前修改相机驱动时的滤波,滤得太狠了。于是修改驱动,y和z方向的点云不能太少,终于可以清除成功了。
问题的根源在于滤波后的点太少而且稀疏, 导致raytrace机制不能清除障碍。 点云滤波不能直接滤到自己需要的范围,比如即使你实际需要1m的距离,驱动里也不能只给1m,竖直y方向也不能太小,体素滤波的体素不能太大,一般取0.01,这个对点云数量的影响也很大。