
这个话题是显示所有的约束,包括同一轨迹和不同轨迹的Inter约束,Intra约束。
以Inter constraints, different trajectories 和 Inter residuals, different trajectories为例进行分析,内容如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94# 每个点的 z为0.0,省略
header:
seq: 0
stamp:
secs: 1673860622
nsecs: 104007813
frame_id: "map"
ns: "Inter constraints, different trajectories"
# 12个点,有6个点相同或极为接近
points:
-
x: 2.93968786067
y: -1.41820975755
-
x: 3.44855066169
y: -1.24014780956
-
x: -0.000569545301176
y: 0.00522600210993
-
x: 3.4816963258
y: -1.19978045681
-
x: 3.45484823588
y: -1.19817846586
-
x: 3.78063457495
y: -1.54584384415
-
x: 3.45484823588
y: -1.19817846586
-
x: 4.61884003257
y: -1.49287256215
-
x: 3.45484823588
y: -1.19817846586
-
x: 4.6545497049
y: -1.84995755765
-
x: 3.45484823588
y: -1.19817846586
-
x: 4.91335613134
y: -2.16836009999
-
header:
seq: 0
stamp:
secs: 1673860622
nsecs: 104007813
frame_id: "map"
ns: "Inter residuals, different trajectories"
# 12个点,有些点很接近,结果构成的线很短
points:
-
x: 3.44855066169
y: -1.24014780956
-
x: 3.47573816704
y: -1.1999840042
-
x: 3.4816963258
y: -1.19978045681
-
x: 3.47896481246
y: -1.20118000282
-
x: 3.78063457495
y: -1.54584384415
-
x: 3.80065304682
y: -1.55796489639
-
x: 4.61884003257
y: -1.49287256215
-
x: 4.65790271882
y: -1.44107978827
-
x: 4.6545497049
y: -1.84995755765
-
x: 3.00991092288
y: -2.53605574275
-
x: 4.91335613134
y: -2.16836009999
-
x: 3.11523021674
y: -2.61951559764
源码中可以看到Rviz显示的是LINE_LIST类型的visualization_msgs::Marker,这里要提一下Rviz显示的线类型,如下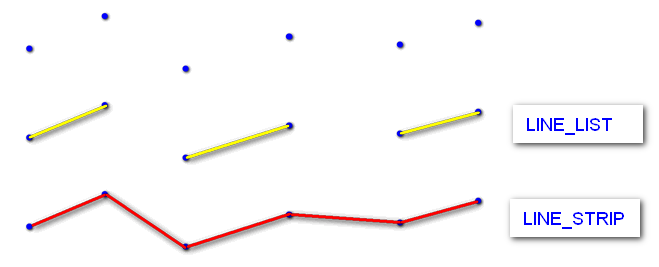
LINE_LIST是两两连接而成的线段,在carto这里,点数一定为偶数。把上面消息内容,没两个点的坐标连线,就可以得到Rviz里的显示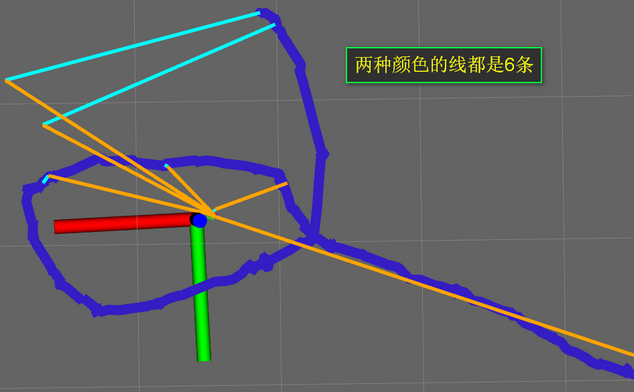
黄线有6条,水绿线有2条比较长,仔细还能看到3条很短的,最后一条在坐标系附近,肉眼已经看不到。Inter约束和residual个数相同,有一个共同的端点原因可以看源码。
看MapBuilderBridge::GetConstraintList源码部分有些跳过了1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28const auto trajectory_node_poses =
map_builder_->pose_graph()->GetTrajectoryNodePoses();
const auto submap_poses = map_builder_->pose_graph()->GetAllSubmapPoses();
const auto constraints = map_builder_->pose_graph()->constraints();
for (const auto& constraint : constraints)
{
const auto submap_it = submap_poses.find(constraint.submap_id);
if (submap_it == submap_poses.end()) {
continue;
}
const auto& submap_pose = submap_it->data.pose;
const auto node_it = trajectory_node_poses.find(constraint.node_id);
if (node_it == trajectory_node_poses.end()) {
continue;
}
const auto& trajectory_node_pose = node_it->data.global_pose;
const Rigid3d constraint_pose = submap_pose * constraint.pose.zbar_ij;
// Inter constraints, different trajectories 线段的两个端点
constraint_marker->points.push_back(
ToGeometryMsgPoint(submap_pose.translation()));
constraint_marker->points.push_back(
ToGeometryMsgPoint(constraint_pose.translation()));
// Inter residuals, different trajectories 线段的两个端点
residual_marker->points.push_back(
ToGeometryMsgPoint(constraint_pose.translation()));
residual_marker->points.push_back(
ToGeometryMsgPoint(trajectory_node_pose.translation()));
从最后可以看出,共同的端点是constraint_pose,map坐标系下。