
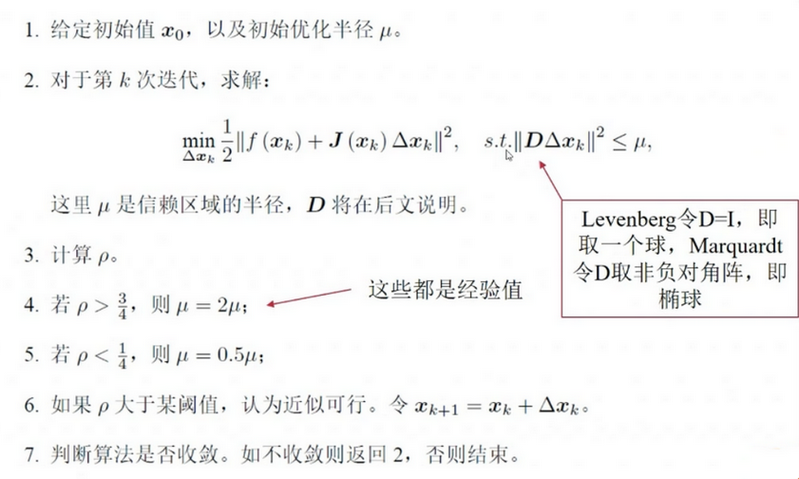
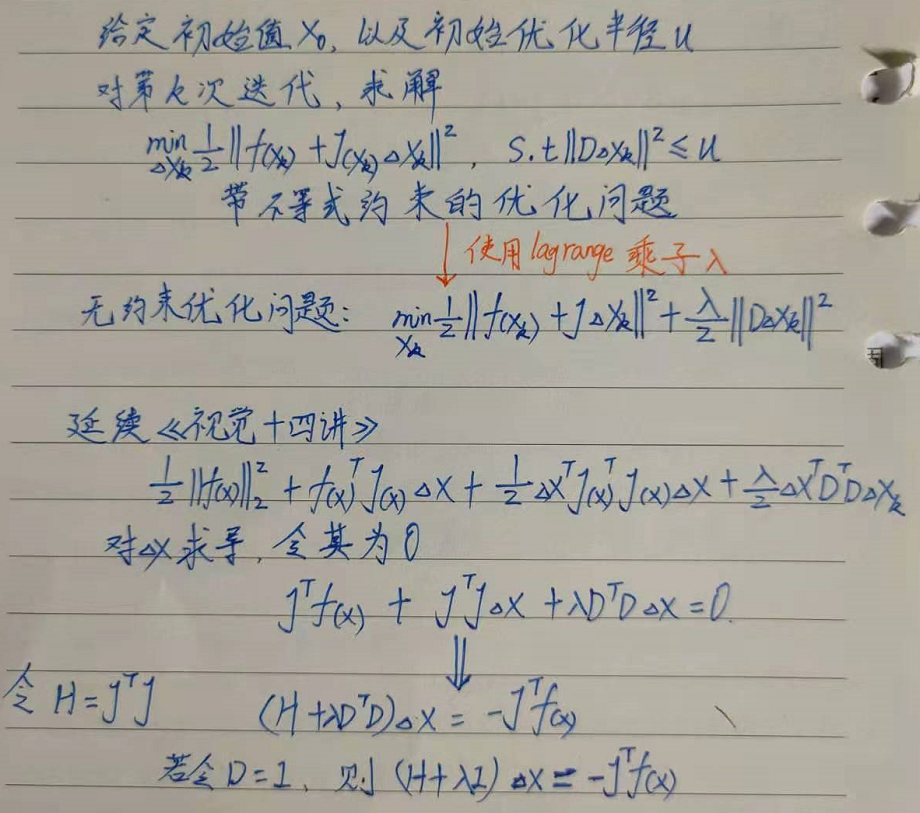
利文伯格法是对高斯牛顿法的改进,是把梯度下降法与高斯牛顿法进行线性组合,属于信赖区域法,认为近似只在区域内可靠,控制每一步迭代的步长以及方向。 高斯牛顿法属于线搜索,即先找方向,再确定步长。
一直到 满足Lipschitz连续且非奇异,算法二次收敛。利普希茨连续的定义为:对于函数 f(x),若其任意定义域中的 , ,都存在 ,使得
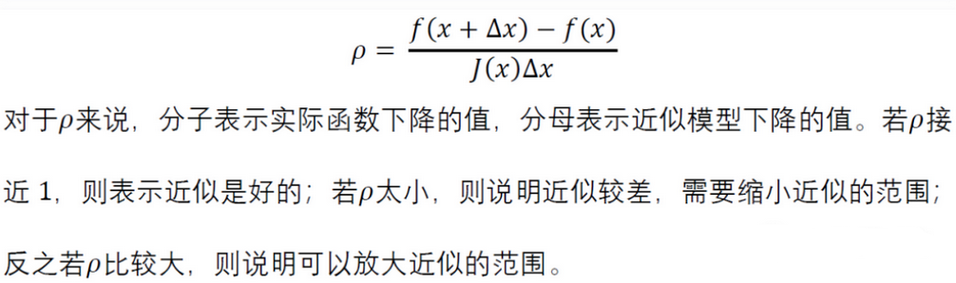
阻尼因子μ作用如下:
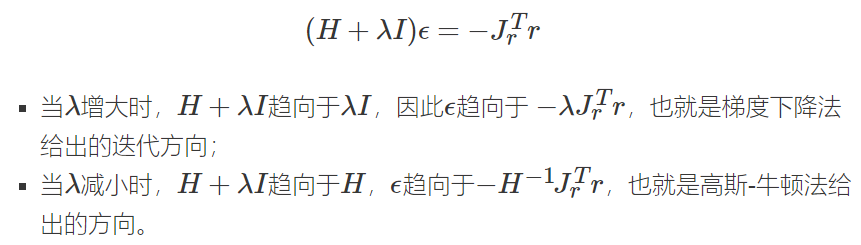
μ非常大,说明此时高斯牛顿的一次泰勒展开近似效果不好,更新方式偏向近似最速下降法。
μ比较小,说明此时高斯牛顿的一次泰勒展开近似效果挺好的,更新方式偏向近似高斯牛顿法。
狗腿法就是引入信赖区域代替LM算法中的阻尼项
利文伯格法的特点:
- μ大于0 保证了系数矩阵的正定,解决了高斯牛顿法的缺陷,迭代朝着下降方向进行。
即使初值距离(局部)最优解非常远,利文伯格法仍可以求解成功
利文伯格法的收敛速度要稍微低于高斯牛顿法,但更鲁棒
可以在一定程度避免系数矩阵的奇异和病态问题
对于以上几种方法, 不会直接求系数矩阵的逆,而是用矩阵分解,例如QR, Cholesky分解,这个矩阵往往有稀疏形式,为SLAM的实时求解提供了可能。SLAM中,Pose Graph的结构会越来越大,H矩阵如果不是稀疏的,维数会达到几千,求逆矩阵会极其耗时,不可能实时求解。
矩阵之所以是稀疏,根本原因是约束只和它周边少数的节点有关。线搜索方法: 首先找到一个下降的方向,目标函数将沿其下降。然后再确定步长,从而决定沿该方向到底移动多远。 下降方向可以通过各种方法计算,如梯度下降法、牛顿法和拟牛顿法。步长可以精确或不精确地确定。
置信域法Trust Region: 在搜索空间的子集内应用模型函数(通常是二次方程)来近似目标函数,这个空间被称为置信域。如果模型函数成功地使真正的目标函数最小化,则扩大置信域。否则收缩置信域并且再次尝试求解模型函数的优化问题。