
主要是LaserScanMatcher的构造函数:1
2
3
4
5ros::init(argc, argv, "LaserScanMatcher");
ros::NodeHandle nh;
ros::NodeHandle nh_private("~");
scan_tools::LaserScanMatcher laser_scan_matcher(nh, nh_private);
ros::spin();
构造函数里初始化一系列参数,重点就是回调函数scanCallback1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21// 第一帧scan, cache the tf from base to the scanner
if (!initialized_)
{
createCache(scan_msg); // caches the sin and cos of all angles
// cache the static tf from base to laser
if (!getBaseToLaserTf(scan_msg->header.frame_id))
{
ROS_WARN("Skipping scan");
return;
}
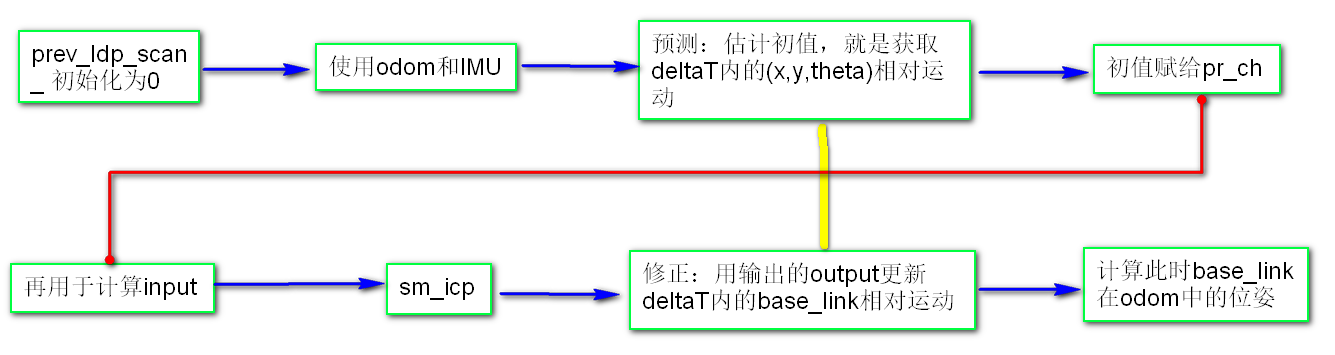
// 保存scan数据到 LDP prev_ldp_scan_;
laserScanToLDP(scan_msg, prev_ldp_scan_);
last_icp_time_ = scan_msg->header.stamp;
initialized_ = true;
}
// 第二帧及以后的scan
index++; // static unsigned int index;
ROS_INFO("scan index: %d", index);
LDP curr_ldp_scan;
laserScanToLDP(scan_msg, curr_ldp_scan);
processScan(curr_ldp_scan, scan_msg->header.stamp);
公式计算
newKeyframeNeeded
1 | if (fabs(tf::getYaw(d.getRotation())) > kf_dist_angular_) |
优先判断相对旋转
调用是这样:1
2
3
4
5
6
7
8
9
10// 交换新旧frame, key frame 的意思应该是当前配准时的参考帧
// 这个在机器人一直走直线或原地旋转时很难发生
if (newKeyframeNeeded(corr_ch))
{
// generate a keyframe
ld_free(prev_ldp_scan_);
prev_ldp_scan_ = curr_ldp_scan;
// 更新下一个时间段的 f2b_kf
f2b_kf_ = f2b_;
}prev_ldp_scan_之前是第一帧scan的数据,只有需要 key frame时,才会更新它,但在processScan开头又会把估计位姿和真值初始化为0。 如果没有达到运动阈值,prev_ldp_scan_还是第一帧scan,时间也是第一帧的时间,仍以第一帧为基准进行ICP配准