
机器人SLAM问题中涉及到平移和旋转,平移是在欧氏空间中,连续的平移变换只需要向量相加。 可是旋转是在非欧空间了,连续的旋转变换就是矩阵连续右乘
右手坐标系:x向前(roll),y向左(pitch),z向上(yaw)
用矩阵表示绕某轴旋转
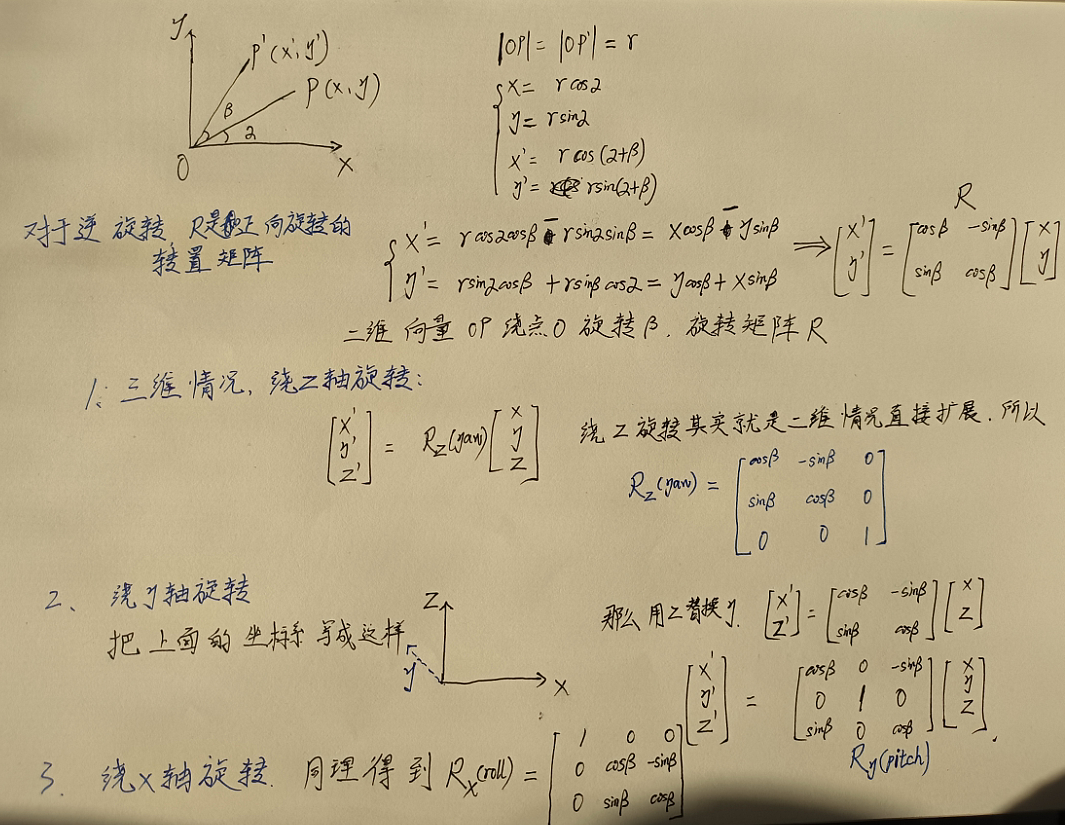
旋转矩阵
坐标系A变换到B,从坐标系B到坐标系A的旋转矩阵的每一列,都是{B}的坐标轴单位向量在{A}中的表示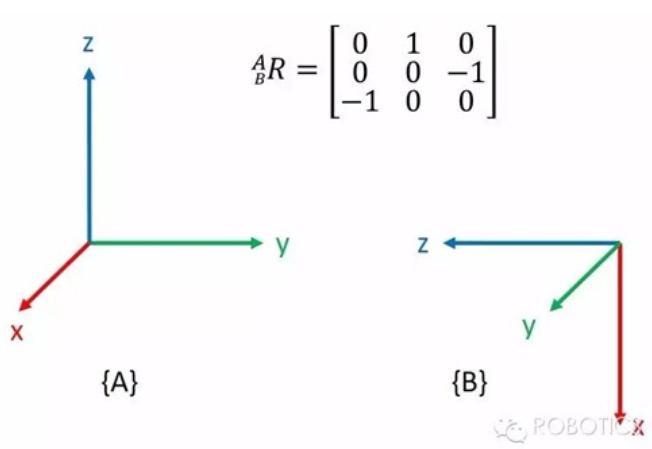
旋转矩阵R是一个行列式为1的正交矩阵,而且行向量和列向量的长度都为1,所以它的转置就是它的逆,而逆矩阵就可以将坐标系旋转回来。
R的每一行就是{A}的坐标轴单位向量在{B}中的表示。
SO(n)是特殊正交群,这个集合由n维空间的旋转矩阵组成。 SO(3)指三维空间的旋转。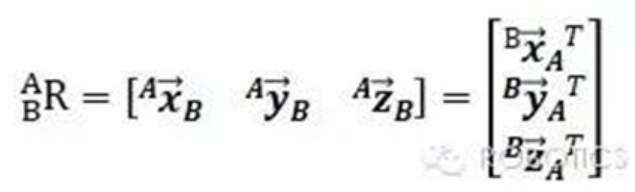
变换矩阵
左上角为旋转矩阵,右侧为平移向量,这种矩阵又称为特殊欧氏群
逆矩阵的形式
如果一个点的坐标是 ,那么点作T变换后的坐标就写作 ,按齐次矩阵和坐标形式计算就可得到。
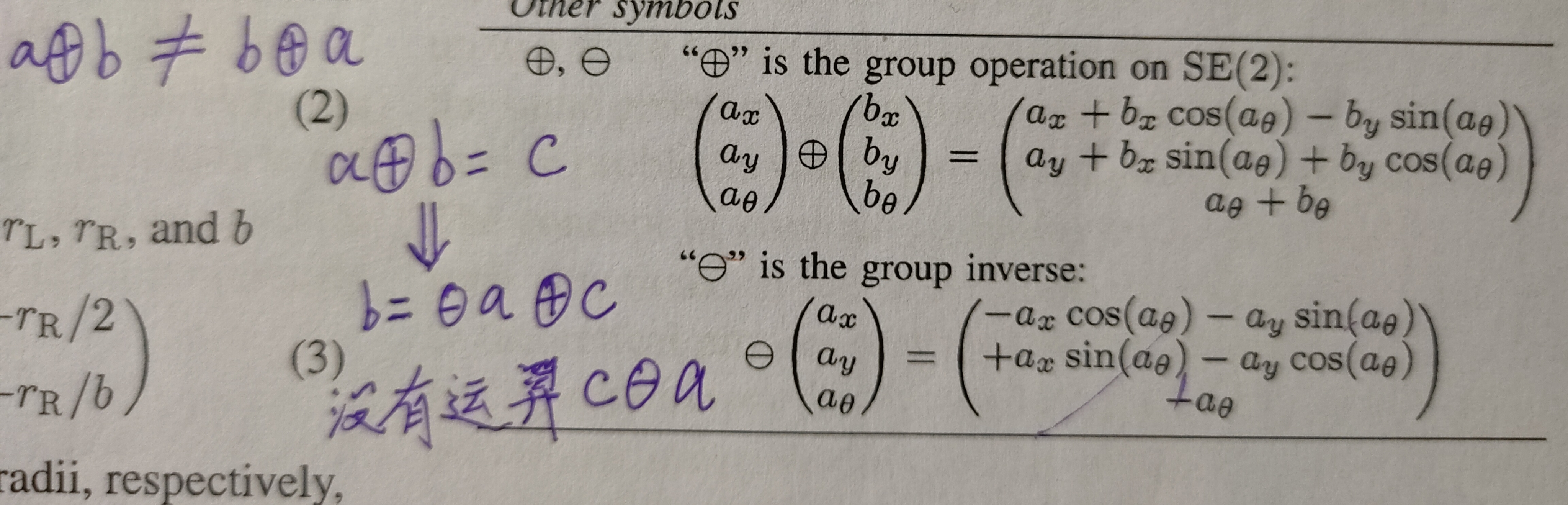
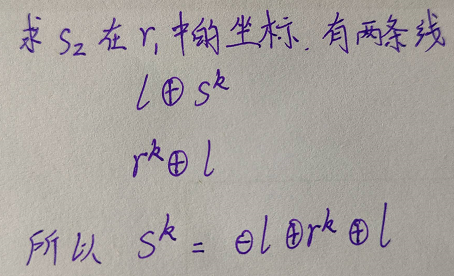
Censi 公式
我习惯用Censi论文的公式,还可以用Grisetti派系的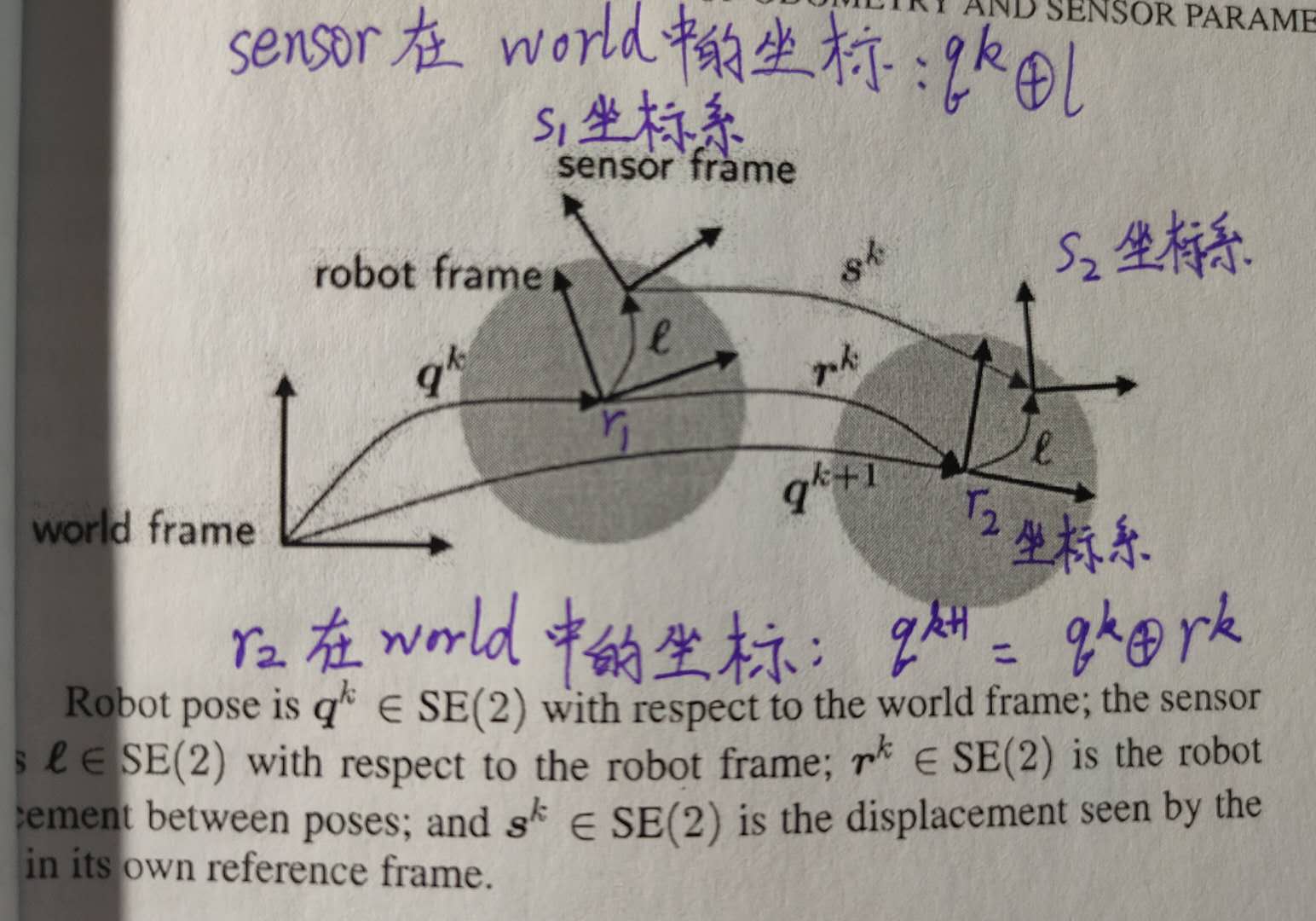
$\quad\quad\quad\quad\quad\quad\quad\Downarrow$
其实这里就是 ,只是在二维平面,R就是绕Z轴旋转的旋转矩阵形式。
左乘和右乘
左乘是行变换,右乘是列变换。这是因为习惯上来说,空间中的向量用列向量表示,用矩阵左乘列向量,就是把它在空间当中变换。
若绕静坐标系(世界坐标系)旋转,则左乘,也是变换矩阵 x 坐标矩阵。 在固定坐标系下,一个点 经过一个旋转矩阵,再经过一个旋转 ,总共旋转 ,这是左乘。 向量旋转中的右乘本没必要,甚至会引起人误解。
若是绕动态坐标系旋转(自身建立一个坐标系),则右乘,也就是坐标矩阵 x 变换矩阵。
即左乘是相对于坐标值所在的坐标系(世界坐标系)下的三个坐标轴进行旋转变换,右乘则是以当前点为旋转中心,进行旋转变换。
车在全局坐标系中运动,这可以看做绕固定轴旋转的过程,是左乘矩阵具体去看文章: 欧拉角,旋转矩阵,旋转向量,四元数
图优化里的相对位姿是由右乘获得的,即节点 $X_i$ 和 $X_j$ 之间的相对位姿是
常用的公式 是把点P从坐标系转换到 坐标系,由于旋转时,两个坐标系原点还是重合的,我们说经过了平移后,平移向量 是从坐标系 坐标系指向