
概述
ROS 的navigation官方功能包提供了三种全局路径规划器:carrot_planner、global_planner、navfn,默认使用的是navfn。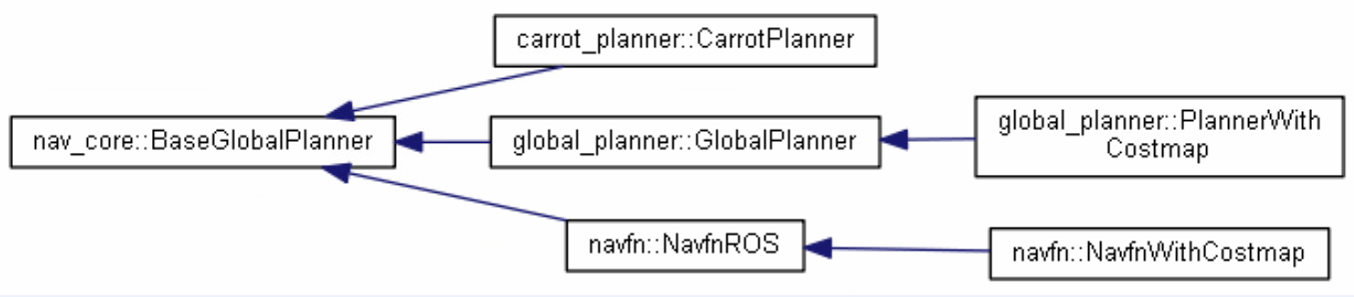
carrot_planner检查需要到达的目标是不是一个障碍物,如果是一个障碍物,它就将目标点替换成一个附近可接近的点。因此,这个模块其实并没有做任何全局规划的工作。在复杂的室内环境中,这个模块并不实用。navfn使用Dijkstra算法找到最短路径。
- global planner是navfn的升级版。它支持
A*算法; 可以切换二次近似; 切换网格路径;
目前常用的是global_planner,需要先设定move_base的参数: base_global_planner: "global_planner/GlobalPlanner"。global_planner根据给定的目标位置进行总体路径的规划,只处理全局代价地图中的数据。提供快速的、内插值的全局规划,目前已经取代navfn。遵循navcore::navcore 包中指定的BaseGlobalPlanner接口。它接受costmap生成的全局代价地图规划出从起始点到目标点的路径,为local_planner规划路径作出参考。
global_planner没有提供类似D*这样的动态方法,而是用了定时规划路径,ROS是启动了一个线程,在移动过程中对路径不断的重新规划。这个feature是可以去掉的,特别是当你的运算负载很高,处理器又有限的情况下。还有重新规划(当找不到路径,也就是走着走着新扫描到未知区域的障碍或者动态增加的障碍)两种办法。加上了定时规划和重新规划之后的A*和D*几乎是一模一样的。
配置
move_base是通过plugin调用全局规划器的,文件bgp_plugin.xml1
2
3
4
5
6
7<library path="lib/libglobal_planner">
<class name="global_planner/GlobalPlanner" type="global_planner::GlobalPlanner" base_class_type="nav_core::BaseGlobalPlanner">
<description>
A implementation of a grid based planner using Dijkstras or A*
</description>
</class>
</library>
在package.xml的配置中,加入如下行:1
2
3<export>
<nav_core plugin="${prefix}/bgp_plugin.xml" />
</export>
参数
allow_unknown: true 是否允许规划器规划在未知区域创建规划,只设置该参数为true还不行,还要在
costmap_commons_params.yaml中设置track_unknown_space参数也为true才行,default_tolerance: 0.0 当设置的目的地被障碍物占据时,需要以该参数为半径寻找到最近的点作为新目的地点.
visualize_potential: false 是否显示从PointCloud2计算得到的势区域. 这个参数可以让你看见
potential array的图像,看计算出的cost是怎么样子(颜色深浅代表距离起始点的远近)use_dijkstra: true 设置为true,将使用dijkstra算法, 否则使用
A*算法use_quadratic: true 设置为true,将使用二次函数近似函数计算
potential,否则使用更加简单的计算方式,这样节省硬件资源use_grid_path: false 默认使用梯度下降法,路径更为光滑,从周围八个栅格中找到下降梯度最大的点。 如果为true,使用栅格路径,从终点开始找上下或左右4个中最小的栅格直到起点,会规划一条沿着网格边界的路径,偏向于直线穿越网格
old_navfn_behavior: false navfn是非常旧的ROS系统中使用的,现在已经都用
global_planner代替navfn了,所以不建议设置为true.lethal_cost: 253 致命代价值,默认是设置为253,可以动态来配置该参数.
neutral_cost: 50 中等代价值,默认设置是50,可以动态配置该参数.
cost_factor: 3.0 代价地图与每个代价值相乘的因子.
publish_potential: true 是否发布costmap的势函数.
orientation_mode: 0 如何设置每个点的方向
(None = 0,Forward = 1,Interpolate = 2,ForwardThenInterpolate = 3,Backward = 4,Leftward = 5,Rightward = 6)(可动态重新配置)orientation_window_size: 1 根据
orientation_mode指定的位置积分来得到使用窗口的方向.默认值1,可以动态重新配置.
A*和Dijkstra两种算法
两种算法的效果对比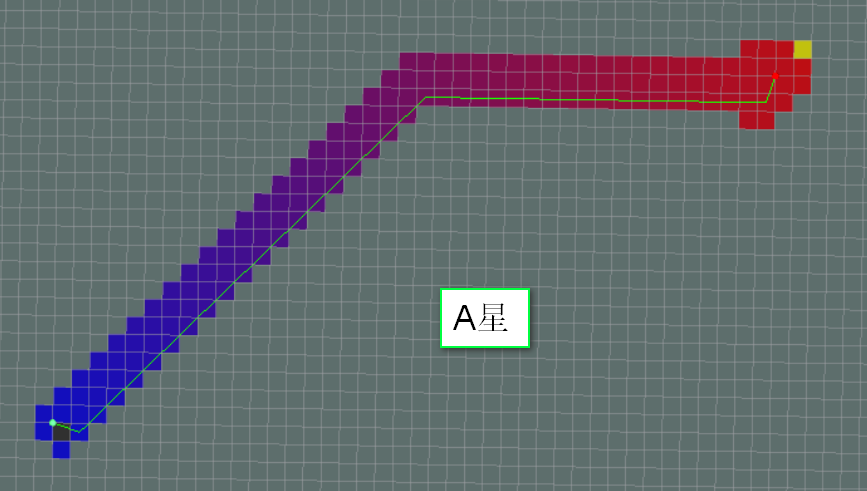
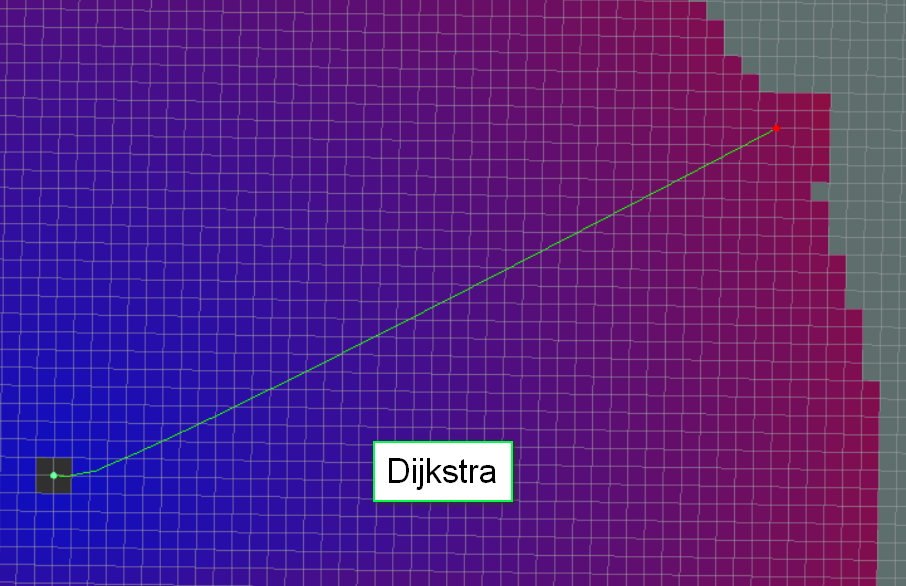
A*比Dijkstra少计算很多,但可能不会产生相同路径。另外,在global_planner的A*里,the potentials are computed using 4-connected grid squares, while the path found by tracing the potential gradient from the goal back to the start uses the same grid in an 8-connected fashion. Thus, the actual path found may not be fully optimal in an 8-connected sense. (Also, no visited-state set is tracked while computing potentials, as in a more typical A* implementation, because such is unnecessary for 4-connected grids).
话题
发布的话题是~<name>/plan(nav_msgs/Path),即最新规划出的路径,每次规划出新路径就要发布一次,主要用于观测。
GlobalPlanner::initialize
1 | if (!initialized_) |