
欧氏变换
欧氏变换(Isometry Transform)可以看作是维持任意两点距离不变的变换,在实际场景中使用比较多。在Eigen中已经内置好了一些常用的欧氏变换:1
2
3
4typedef Transform<float,2,Isometry> Isometry2f;
typedef Transform<float,3,Isometry> Isometry3f;
typedef Transform<double,2,Isometry> Isometry2d;
typedef Transform<double,3,Isometry> Isometry3d;
欧氏变换必须初始化,如果没初始化,Isometry3d中的元素全为0,一般初始化为单位矩阵,也可以初始化为Quaternion。 赋值可以通过它的成员函数.rotate()和.translate()完成
1 | AngleAxisd rotation(3.1415926 / 4, Vector3d(1, 0, 1).normalized()); |
A.translate(B)等价于A×B,而A.pretranslate(B)等价于B×A,对应于左乘和右乘的区别。凡是前面带pre的函数,其变化都是相对于上一步变化之前的状态进行的。举例说我要新建一个按固定轴先平移后旋转的变换。但我首先设置了旋转,然后再设置平移。这个时候设置平移就不能用translate()了,而应该用pretranslate()。因为第一步已经对坐标系进行了旋转,后面的平移是在旋转后的坐标系中进行的,所以最好不要用pre开头的函数
针对求解Ax = b这种线性问题,Eigen提供了下面几种分解方法,每一种方法都提供了一个solve()函数以便求解得到 x,Eigen对每一种分解方法的速度和精度做了如下对比。当然对于小矩阵,各个方法没什么区别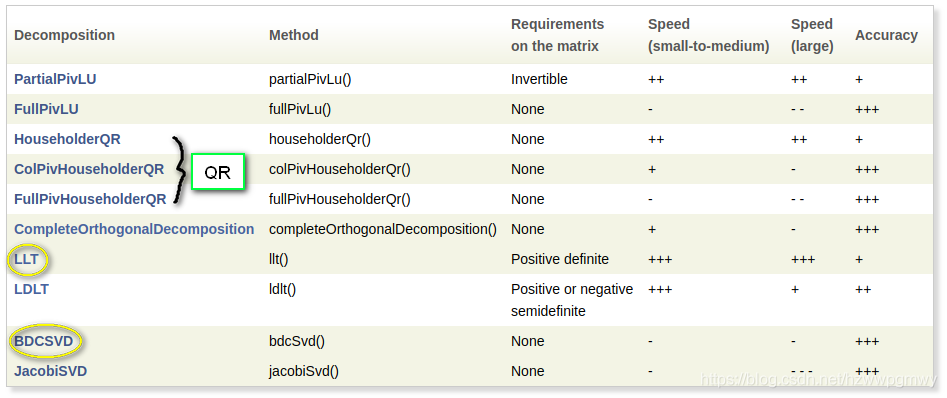
LLT(cholesky)是最快的求解器,但是精度也是最差的,并且只能对正定矩阵进行分解,而LDLT则可以应对正半定和负半定问题,精度较LLT更高,所以尽量使用LDLT,但是LDLT在求解大矩阵问题时,耗时较QR增加更多,所以究竟选择那种分解方式求解问题,需要根据速度和精度综合考量
使用info()判断是否收敛1
2
3SelfAdjointEigenSolver<Matrix2f> eigensolver(A);
if (eigensolver.info() != Success)
abort();
对于自伴随矩阵,Eigen使用SelfAdjointEigenSolver进行特征值分解1
2
3
4Eigen::SelfAdjointEigenSolver< Eigen::Matrix3d > eigen_solver( matrix_33 );
// 特征值 特征向量
cout << "Eigen values = " << eigen_solver.eigenvalues( ) << endl;
cout << "Eigen vectors = " << eigen_solver.eigenvectors( ) << endl;
cholesky 分解
Cholesky分解是把一个对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解。Eigen的LLT分解实现了Cholesky分解。代码如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
int main(int argc, char** argv)
{
Eigen::Matrix2d down;
down<<1,0,
2,1;
// A <<1,2
// 2,5
Eigen::Matrix2d A = down*down.transpose();
std::cout<<"A: "<< A <<std::endl;
// 直接用 llt() 函数
Eigen::Matrix2d ml = A.llt().matrixL();
Eigen::Matrix2d testA = ml*ml.transpose();
std::cout<<"mllt: "<< ml<<std::endl;
std::cout<<"testA: "<<testA<<std::endl;
return 0;
}
对于Ax=b,LLT分解并不会检查 A 矩阵的对称性,所以如果你输入的 A 矩阵不是正定的Hermite矩阵,你也会得到分解结果,只不过是错误的
LDLT分解
LDLT分解法实际上是Cholesky分解法的改进,优先使用LDLT而不是LLT方法。 Cholesky分解法虽然不需要选主元,但其运算过程中涉及到开方问题,而LDLT分解法则避免了这一问题。仍然要求A矩阵正定。 其中L为下三角形 单位 矩阵(即主对角线元素皆为1,下三角其他元素不为0),D为对角矩阵, 为L的转置矩阵。1
2
3
4
5
6
7Matrix2f A, b;
A << 2, -1, -1, 3;
b << 1, 2, 3, 1;
cout << "Here is the matrix A:\n" << A << endl;
cout << "Here is the right hand side b:\n" << b << endl;
Matrix2f x = A.ldlt().solve(b);
cout << "The solution is: \n" << x << endl;
QR分解
1 | Matrix3f A; |
SVD分解 - 奇异值分解
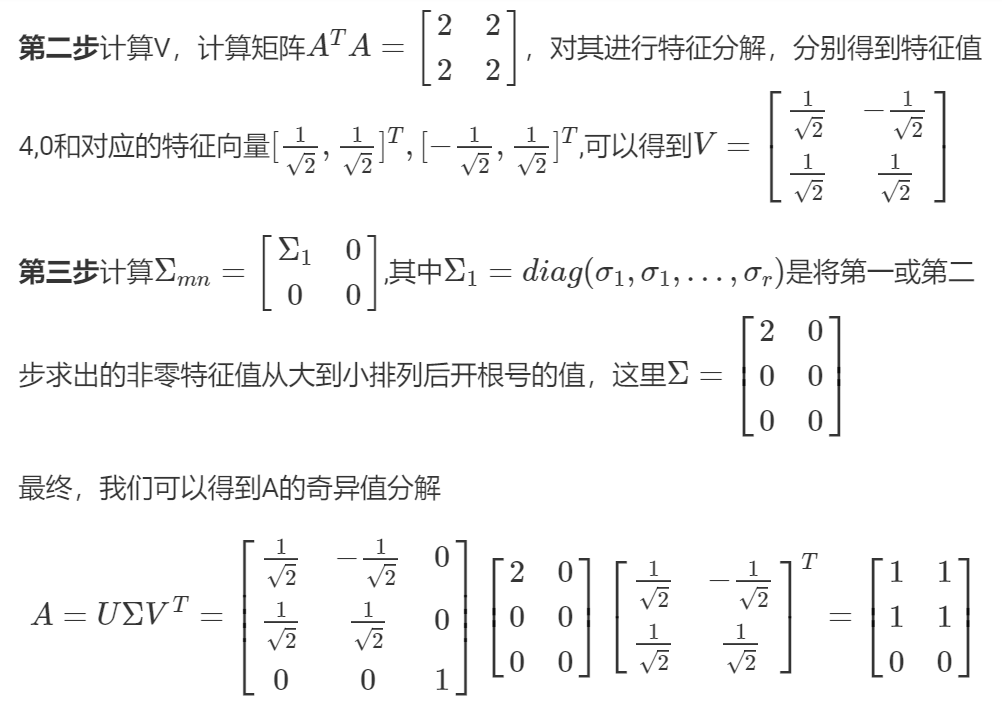
特征值分解仅针对方阵,而不是方阵的矩阵就有了SVD分解:
其中A为m x n的矩阵, 正交矩阵 U(m x m阶) 和 V(n x n阶)。
矩阵U的列称为左奇异向量, 是正交的。矩阵V的列向量(也称为右奇异向量)也是正交的.
此时的A如果是方阵,那么逆矩阵也很容易求出:
奇异值分解同时包含了旋转、缩放()和投影三种作用。特征值分解只有缩放的效果。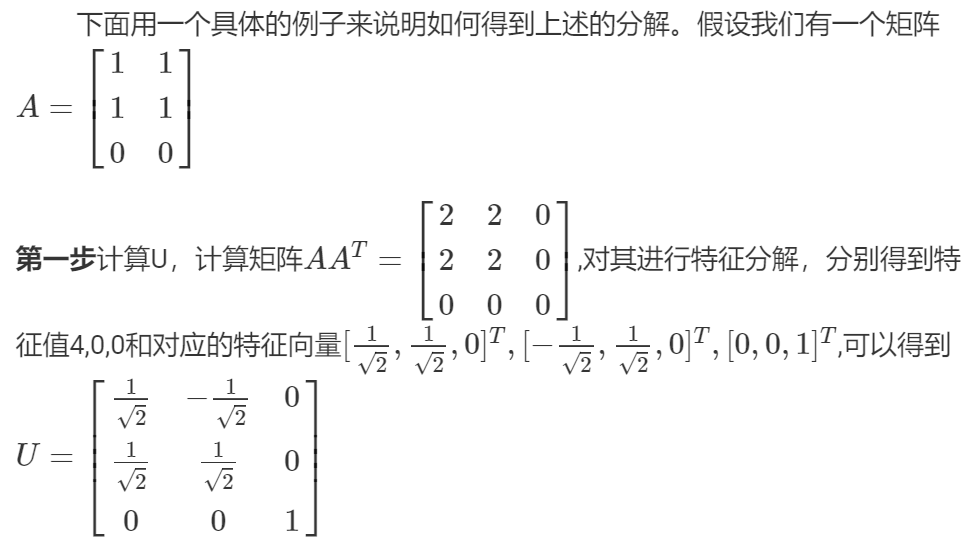
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27Eigen::Matrix3f A;
A << 3,4,2,
1,2,4,
8,0,1;
// SVD分解
Eigen::JacobiSVD<Eigen::Matrix3f> svd(A, Eigen::ComputeFullU | Eigen::ComputeFullV);
// 求出三个矩阵
Eigen::Matrix3f U = svd.matrixU();
Eigen::Matrix3f V = svd.matrixV();
// 推荐方法,从对角线元素组成的向量直接构造对角矩阵
Eigen::Matrix3f diag = svd.singularValues().asDiagonal();
cout << "U: "<<endl<< U <<endl<<endl;
cout << "V transpose: "<< endl << V.transpose() <<endl<<endl;
cout << "Sigma from SVD: "<< endl << diag<<endl<<endl;
// 判断U和V是否正交矩阵(酉矩阵),和转置的乘积为单位矩阵
cout << U.isUnitary() <<endl<<endl;
cout << V.isUnitary() <<endl<<endl;
cout <<"***********************"<<endl;
// 从公式推导出的对角矩阵,有误差
Eigen::Matrix3f Sigma = U.inverse() * A * V.transpose().inverse();
cout << "Sigma from formula: "<< endl << Sigma <<endl<<endl;
// 大致等于原矩阵A
cout<< "A from formula: "<< endl <<U *Sigma *V.transpose()<<endl;
运行结果:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
U:
0.4853 -0.514629 -0.706853
0.299358 -0.661777 0.68734
0.821504 0.545168 0.167102
V transpose:
0.904647 0.275928 0.324773
0.423663 -0.664689 -0.615385
-0.0460712 -0.6943 0.71821
S from SVD:
9.20501 0 0
0 5.0882 0
0 0 2.09237
1
1
***********************
S from formula:
9.20501 -9.53674e-07 -2.38419e-07
-1.3113e-06 5.0882 1.05798e-06
-7.15256e-07 2.90573e-07 2.09237
A from formula:
3 4 2
1 2 4
8 0 1
Eigen提供了两个类以实现SVD分解:BDCSVD(大矩阵)和JacobiSVD(小矩阵),推荐使用BDCSVD,因为当发现要分解的矩阵是小矩阵时,将自动切换到JacobiSVD
- A转为正交矩阵
把上面的ComputeFullU换成ComputeThinU,那么 就是一个正交矩阵B1
2
3
4
5
6
7
8
9// SVD分解, ComputeThin参数时,A必须是 Eigen::MatrixXf
Eigen::JacobiSVD<Eigen::MatrixXf> svd(A, Eigen::ComputeThinU | Eigen::ComputeThinV );
// 求出三个矩阵,这样B就是个正交矩阵
Eigen::Matrix3f U = svd.matrixU();
Eigen::Matrix3f V = svd.matrixV();
Eigen::Matrix3f B = U * V.transpose();
cout << B.transpose() << endl <<endl;
cout << B.inverse() << endl<<endl;
线性方程组的最小二乘解
如果一个线性方程组是超定的(overdeterminated,未知数个数>方程数),这时候常规方法无解,就需要用最小二乘拟合最优结果。最精确的解法是SVD分解。SVD也有多种解法,官方推荐的是BDCSVD方法。
如下超定方程组: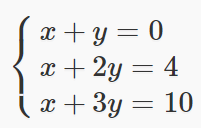
最小二乘求解代码如下:1
2
3
4
5
6
7
8
9
10MatrixXf A(3, 2);
Vector3f b;
Vector2f x;
A << 1,1, 1,2, 1,3 ;
b << 0,4,10;
x = A.bdcSvd(ComputeThinU | ComputeThinV).solve(b);
cout << x << endl;
Vector3f error = (A*x - b).cwiseAbs();
double mean_error = error.mean();
程序运行需要一点时间,最后得到的x就是通过最小二乘算出来的。这里bcdScd()函数里面的参数ComputeThinU | ComputeThinV必须要写(可以先记住),否则会报错。
将得到的解带回方程会发现其并不是严格成立的,有时可能还会相差较大。这是因为对于超定方程,采用最小二乘法得出的解并不一定对每一个方程都严格成立,其确保的是当前解在所有方程上的总误差最小。得到解以后我们可以反算出其解的整体精度
对于小矩阵,逆矩阵和行列式随便算,如果是大矩阵,计算量会很庞大。确定你是否真的需要逆矩阵,因为很多时候求逆矩阵都是为了求解Ax = b问题,所以最好使用上面介绍的分解方法代替.
参考:
Eigen学习与使用笔记
Eigen学习与使用笔记2
Eigen官方文档-AngleAxis
矩阵的特征分解与奇异值分解