1 | // 禁止配置参数的更改 during the following optimization step |
clearPlanner()
不会停止规划,而是强制下次重新初始化planner,要停止继续规划,只能return。 如果本次导航失败或路径不好,出现一大堆TebPose缠绕,在下一次导航时,它们可能还在,要消除就需要clearPlanner();
| 实际中用的是Homotopy Planner,但是它太复杂了,我们先看TebOptimal Planner,前者取的其实是 best Teb Optimal Planner |
1 | bool TebOptimalPlanner::plan( |
isInit()检查trajectory是否初始化: bool isInit() const {return !timediff_vec_.empty() && !pose_vec_.empty();}
1 | // 清空 timediff_vec_ 和 pose_vec_, 之后 isInit返回 false |
关于变量pose_vec_和timediff_vec_,看下篇文章
plan 函数涉及参数 max_vel_x, min_samples, force_reinit_new_goal_dist, allow_init_with_backwards_motion, free_goal_vel
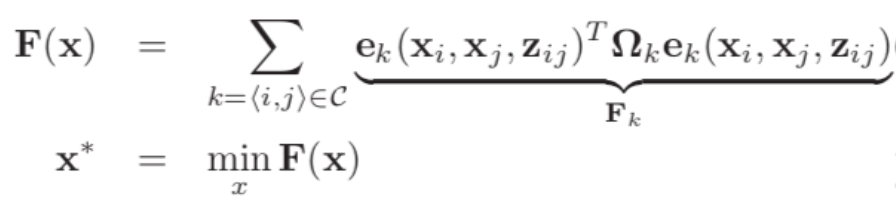
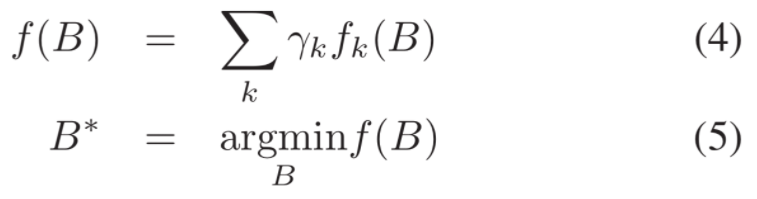
TebOptimalPlanner::plan()主要是根据输入的初始路径初始化或更新时间弹性带(轨迹)的初始状态,设置了轨迹起始点以及速度加速度的约束, 最后调用 optimizeTEB() 函数:这里是核心中的核心,最关键的就是建图buildGraph和优化OptimizeGraph两个步骤
将轨迹优化问题构建成了一个g2o图优化问题,并通过g2o中关于大规模稀疏矩阵的优化算法解决,涉及到构建超图(hyper-graph),简单来说 将机器人位姿和时间间隔描述为节点(vertex),目标函数以及约束函数作为边(edge)。 graph中,每一个约束都为一条边,并且每条边允许连接的节点的数目是不受限制的。
建图是将路径的一系列约束加进去,比如与障碍物保持一定距离,速度、加速度限制、时间最小约束、最小转弯半径约束、旋转方向约束等,这些都转换成了代价函数放在g2o中,g2o优化时会使这些代价函数达到最小。
TebOptimalPlanner 的初始化
在TebLocalPlannerROS::initialize有这样一段1
2
3
4
5
6
7
8
9
10if (cfg_.hcp.enable_homotopy_class_planning)
{
// 省略
}
else
{
planner_ = PlannerInterfacePtr(new TebOptimalPlanner(cfg_,
&obstacles_, robot_model, visualization_, &via_points_) );
ROS_INFO("Parallel planning in distinctive topologies disabled.");
}TebOptimalPlanner的构造函数就一句initialize(cfg, obstacles, robot_model, visual, via_points);,实际是:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27void TebOptimalPlanner::initialize(const TebConfig& cfg,
ObstContainer* obstacles,
RobotFootprintModelPtr robot_model,
TebVisualizationPtr visual,
const ViaPointContainer* via_points)
{
// init optimizer (set solver and block ordering settings)
optimizer_ = initOptimizer();
cfg_ = &cfg;
obstacles_ = obstacles;
robot_model_ = robot_model;
via_points_ = via_points;
cost_ = HUGE_VAL;
prefer_rotdir_ = RotType::none;
setVisualization(visual);
// 在上面的 setVelocityStart 里赋值
vel_start_.first = true;
vel_start_.second.linear.x = 0;
vel_start_.second.linear.y = 0;
vel_start_.second.angular.z = 0;
vel_goal_.first = true;
vel_goal_.second.linear.x = 0;
vel_goal_.second.linear.y = 0;
vel_goal_.second.angular.z = 0;
initialized_ = true;
}initOptimizer()函数在(十) optimizeTEB 2 图优化的过程