
IMU数据去除重力
这就涉及IMU的测量模型,包含两种:加速度计和陀螺仪。加速度计用来测量加速度的大小,陀螺仪用来测量角速度的大小。
IMU的测量值是基于自身坐标系(body坐标系)的三轴加速度和三轴角速度数据,也就是 ,由于受重力加速度的影响,IMU 的测量值并不直接反映其本身的加速度,并且其测量的加速度的坐标是在 Body 系下表示的,与世界坐标系之间存在一个旋转关系,所以需要转换为世界坐标系下的数据,而角速度不需要转换。
IMU的姿态解算选用的旋转顺序为ZYX,即IMU坐标系初始时刻与世界坐标系重合,然后依次绕自己的Z、Y、X轴进行旋转,这样坐标系就会改变,也可以称新的坐标系为body坐标系
IMU加速度计测量的是其感受到的加速度,在静止的时候,其本身是没有加速运动的,但因为重力加速度的作用,其感受的加速度与重力加速度正好相反,所以读到的线加速度z是9.8,而不是-9.8
当加速度计水平放置,即Z轴竖直向上,而且在静止时,读到的加速度可以记作 (0, 0, 9.8) (世界坐标系)
当加速度计旋转一定的姿态时,重力加速度会在加速度的3个轴上产生相应的分量,其本质是世界坐标系下的(0, 0, 9.8)在新的加速度计坐标系(body坐标系)下的坐标,此时读到的是三轴加速度的新坐标。数学关系如下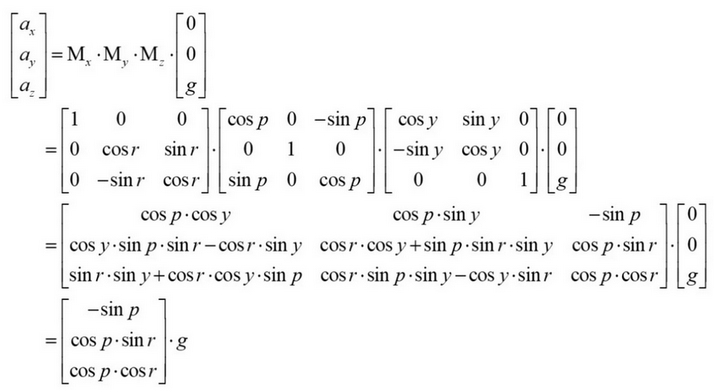
这个结果是在body坐标系
在世界坐标系下,
转换到body坐标系, ,即 ,上面图中的计算结果就是 , 是IMU直接输出的。
那么按说真实加速度应该是这样的1
2
3float accX = imuIn->linear_acceleration.x + sin(pitch) * 9.81;
float accY = imuIn->linear_acceleration.y - sin(roll) * cos(pitch) * 9.81;
float accZ = imuIn->linear_acceleration.z - cos(roll) * cos(pitch) * 9.81;
坐标系变换
IMU不能随意安装时,其坐标系和载体坐标系是对齐的,都是右手坐标系,所以rosrun tf echo imu base_link的结果中,角度应该都是0,这样IMU得到的角度就是IMU当前姿态向载体坐标系对齐的过程。LOAM框架作者为了与其他视觉SLAM的工作进行匹配统一,将点云坐标系进行了坐标变换。
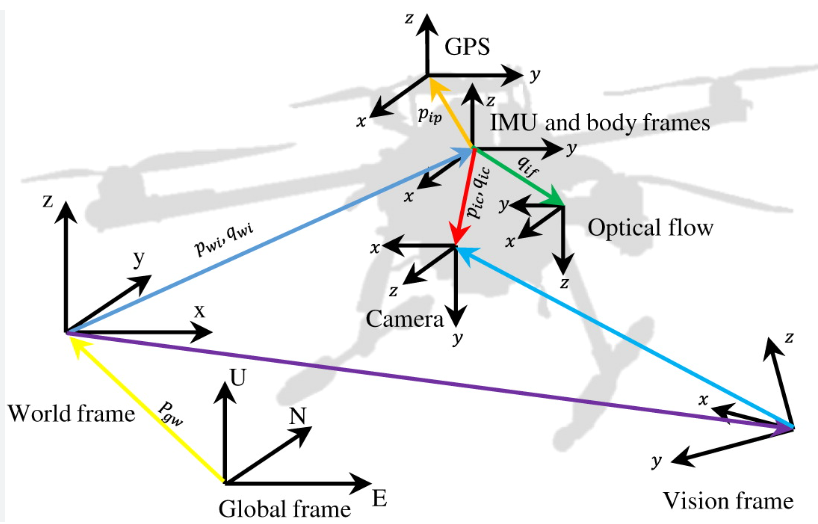
在这张图里,只看IMU和camera坐标系的关系,IMU的x变成Camera的z,y—->x, z—->y。比如车上装相机识别二维码时,镜头总是朝前的,也就是图中的朝向。
这样一来,实际三轴加速度就成了源码里的1
2
3float accX = imuIn->linear_acceleration.y - sin(roll) * cos(pitch) * 9.81;
float accY = imuIn->linear_acceleration.z - cos(roll) * cos(pitch) * 9.81;
float accZ = imuIn->linear_acceleration.x + sin(pitch) * 9.81;
这导致了后面的处理中看似旋转顺序的表示产生了变化,而本质上旋转顺序按物理意义的偏航-俯仰-滚转保持了一致。
参考:IMU去除重力影响