
算法流程
- 初始化
首先定义两个粒子集,开始都是空集,一个用于重采样缓冲的set_a,一个是最终需要的set_b,对每份粒子集合创建kdtree。算法的目的是用粒子集合来表示置信度。
先在AMCL里给定一个初始位姿值和协方差矩阵,粒子数为M。一开始,每一个粒子的权重值都是1/M,位姿的分布是一个高斯分布,每个粒子的初始位姿记做(x,y,theta),其均值是AMCL的初始位姿,方差是从协方差矩阵获得的。将每个粒子插入到kdtree中,对粒子滤波器的粒子集进行聚类。
- 运动模型
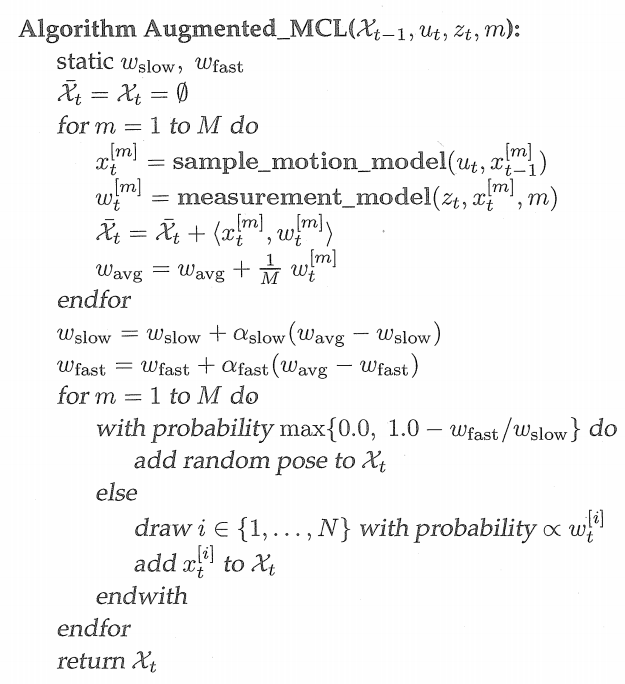
概率模型是 , 使用里程计模型进行估计。对每一个粒子更新位姿。位姿是从运动模型中采样获得的,机器人从t-1时刻运动到t时刻,获得相对运动参数rot1,trans,rot2
最终,对于每个粒子的位姿, x加上相对平移量在x轴的分量(乘以cos), y加上相对平移量在y轴的分量, theta加上两次旋转的参数。这些分量除了跟rot1,trans,rot2有关,还跟AMCL中的四个运动噪声参数alpha1~alpha4有关
- 测量模型
概率模型是 ,使用似然域模型,用于更新每一个粒子的权重。
似然域测量模型认为测量的结果包含一个高斯分布噪声和随机噪声。激光测量距离(x,y)变换到map坐标系。找到距离激光点最近的障碍,查表获得它们的最近距离dist。这个dist也是高斯噪声的均值,所以dist越大,打到障碍物的可能性越小,则粒子不可信,权重越小。
N为一帧激光的点数
似然域测量模型比较理想,因此在场景有些变化,和动态人存在干扰的情况,估计的pose精度会下降。放大测量方差或许会有效果,最好要是能引入类似非线性优化中的核函数(损失函数)或许不错。
- 失效恢复的准备
把每个粒子添加到临时粒子集中,也就是说set_a内的粒子的权重是不同的,更新粒子集的平均权重。根据alpha_slow和alpha_fast计算短期和长期的似然平均
- 重采样
从缓冲的粒子集中替换所有粒子,抽取粒子的概率取决于粒子的权重,重采样之后,粒子的数量不变,权重较小的粒子将被过滤掉,权重较大的粒子将被复制
上面的算法还有两个问题: 1. 粒子重采样的退化问题;2. 固定的粒子群导致无用的计算,影响效率。
每个粒子集合中包含的粒子数量很大,粒子的权重即使在多次重采样之后还是很小,导致位置上相邻的粒子的权重差值不大,从而最后输出的预测位姿不准确。
因此AMCL加入了新的结构体 Cluster,表示相邻粒子的集合,具有权重与位姿等属性,与粒子相似。而其位姿是通过该 Cluster中包含的粒子的位姿加权平均得到。开始时 Cluster的数量与粒子数量相等,即每一个 Cluster中只有一个粒子。当粒子在地图上产生聚合后,Cluster的数量就会下降,此时选取权重最大的 Cluster 作为输出结果。
使用KD树存储粒子信息,并且进行聚类分析。树的叶子节点是每一个粒子,而非叶子节点则保存的是该节点的分叉判断的标准。生成树之后,进行粒子聚类,循环遍历每一个叶子节点,在叶子节点的key值的 ±1 范围内的粒子都归为一类。也就是手,每个粒子周围27个粒子若有相连的,就将它们全部连起来,形成聚类。
处理每一个粒子,先生成一个(0,1)的随机数rand,如果 rand< w_diff = (1 - w_fast / w_slow),那么当前粒子的位姿是随机值。
把上面找出的所有粒子添加到set_b,set_b的粒子个数是M,多数粒子是原来set_a中权重比较大的粒子,而且可能重复。让set_b中的粒子权重全是1 / M
AMCL定位不准的3个依据:
- 协方差矩阵的对角线元素小于阈值
- 当前粒子群的个数大于阈值
- 收敛标志 pf->converged 为false
AMCL用到的算法:
- sample_motion_model_odometry
- likelihood_field_range_finder_model
- Augmented_MCL
- KLD_Sampling_MCL