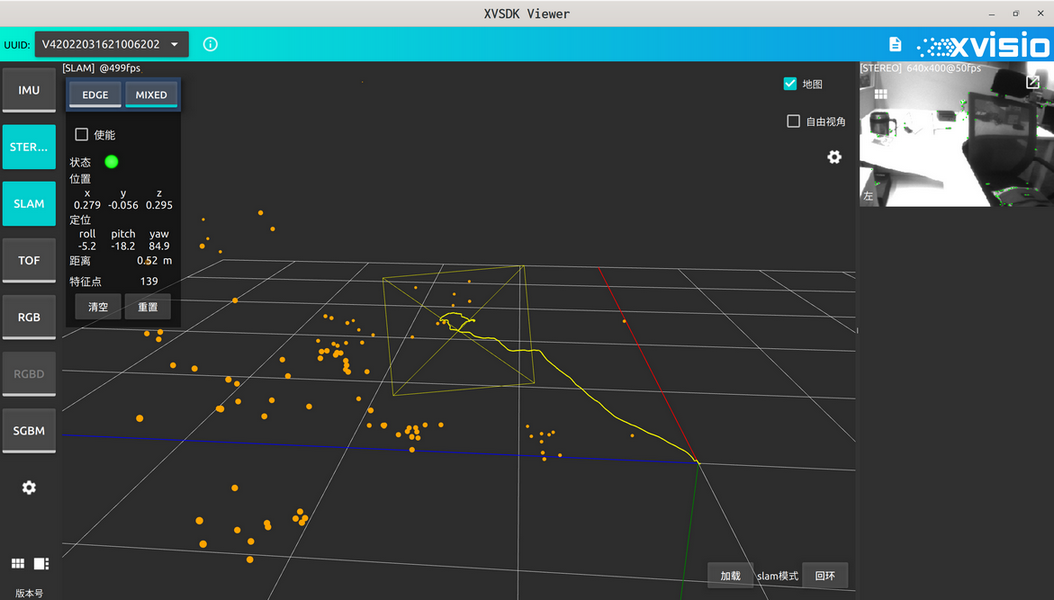
按照指导书进行配置即可,需要注意的只有noetic的配置有些不同。 我模仿驱动里的demo-api,写了一个程序获得SLAM位姿,跟xvisio_viewer的效果相同。发布的话题vslam_pose的频率足够满足需求。 xvisio相机启动时,必须面对有特征的环境,否则之后会一直不能获取SLAM信息。在相机移动过程中也要尽量面对有特征环境,如果面对纯色的环境,会失败,和遮挡镜头是一样的。 但即使这样,偶尔也有失败的情况。 反复测试后,感觉这个相机不适合我的需求,只好放弃了。