
kD树的构建步骤:
在K维数据集合中选择具有最大方差的维度k,然后在该维度上选择中值为pivot对该数据集合进行划分,得到两个子集合;同时创建一个树结点node,用于存储
对两个子集合重复(1)步骤的过程,直至所有子集合都不能再划分为止;
选择数据方差大的维度,是因为沿该坐标轴方向上数据点分散的比较开;另外可以减少最近邻搜索时的回溯代价,减少子树的访问
对于n个实例的k维数据来说,建立kd-tree的时间复杂度为 , 这有时会比较复杂
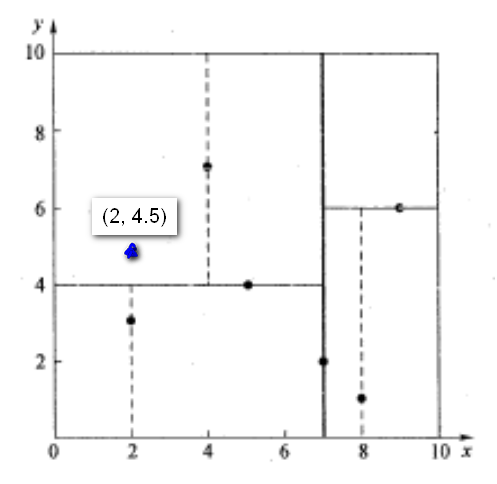
最近邻搜索
算法的时间复杂度是
举例如下: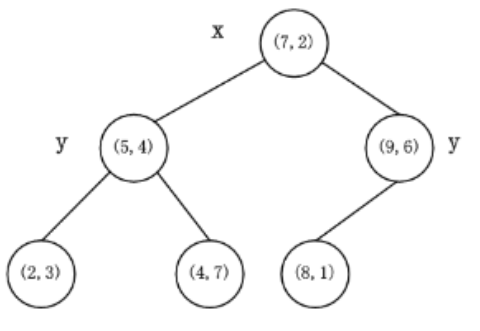
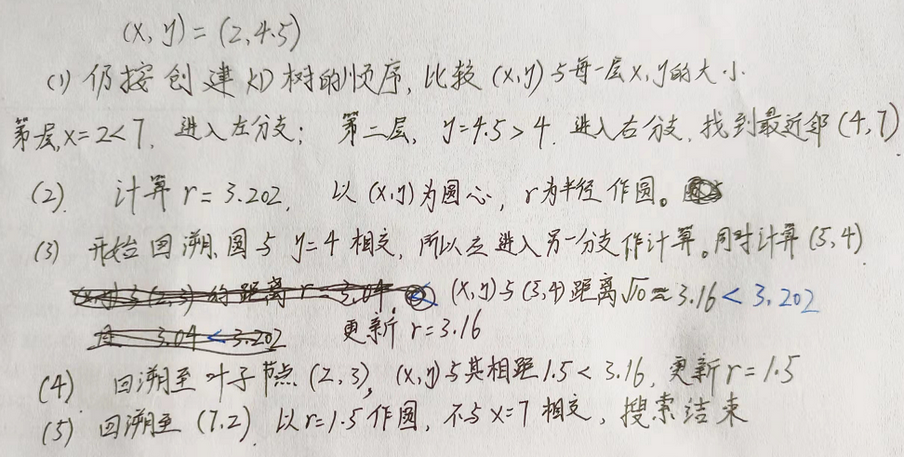
- 不会去搜索根节点的另一颗子树
- 不需要计算每一个节点的欧式距离,而多数情况只需要计算点到超平面的距离就可以了。
- KD树在维度较小时(比如20、30),算法的查找效率很高,然而当数据维度增大(例如:K≥100),查找效率会随着维度的增加而迅速下降。假设数据集的维数为 D,一般来说要求数据的规模 N 满足 ,才能达到高效的搜索,否则大部分的点都会被查询。
PCL中的KD树
nearestKSearch参数1
2
3
4
5
6void pcl::search::Search< PointT >::nearestKSearch(
const PointCloud & cloud,
int k,
std::vector< Indices > & k_indices,
std::vector< std::vector< float > > & k_sqr_distances
) const
对给定的点,搜索 k-nearest neighbors
参数:
- [in] cloud the point cloud data
- [in] k the number of neighbors to search for
- [out] k_indices the resultant indices of the neighboring points, k_indices[i] corresponds to the neighbors of the query point i
- [out] 查询到的点的距离平方
这个函数的返回值是 查询到的个数。
PCL中的KD-Tree一般适用于三维特征点。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
int main()
{
// 读取点云
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
if (pcl::io::loadPCDFile<pcl::PointXYZRGB>("rabbit.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
return -1;
}
// 原始点云着色
for (size_t i = 0; i < cloud->points.size(); ++i){
cloud->points[i].r = 255;
cloud->points[i].g = 255;
cloud->points[i].b = 255;
}
// 建立kd-tree
pcl::KdTreeFLANN<pcl::PointXYZRGB> kdtree; //建立kdtree对象
kdtree.setInputCloud(cloud); //设置需要建立kdtree的点云指针
// K近邻搜索
pcl::PointXYZRGB searchPoint = cloud->points[1000]; // 设置查找点
int K = 900; //设置需要查找的近邻点个数
std::vector<int> pointIdxNKNSearch(K); // 保存每个近邻点的索引
std::vector<float> pointNKNSquaredDistance(K); // 保存每个近邻点与查找点之间的欧式距离平方
if (kdtree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxNKNSearch.size(); ++i){
cloud->points[pointIdxNKNSearch[i]].r = 0;
cloud->points[pointIdxNKNSearch[i]].g = 255;
cloud->points[pointIdxNKNSearch[i]].b = 0;
}
}
std::cout << "K = 900近邻点个数:" << pointIdxNKNSearch.size() << endl;
// 显示点云
pcl::visualization::CloudViewer viewer("cloud viewer");
viewer.showCloud(cloud);
// 或者 pause()
system("pause");
return 0;
}
如果运行时出现报警 Failed to find match for field ‘rgb’ ,则把pcl::PointXYZRGBA>改为pcl::PointXYZ>

从搜索点数来看,当原点云与目标点云重叠区域较大时,优先选择nearestKSearch接口来寻找最近邻,否则优先使用radiusSearch接口来寻找最近邻。 PCL的ICP用的就是 nearestKSearch