
Gazebo对电脑显卡有一定要求,对Nvida显卡支持较好,对AMD的显卡支持较差,如果是AMD的显卡,复杂的世界模型一般加载不出来
利用spawn_model脚本向gazebo_ros节点(在主题中,空间名为 gazebo)发出服务请求,进而添加 URDF 到 Gazebo 中1
rosrun gazebo_ros spawn_model -file `rospack find MYROBOT_description`/urdf/MYROBOT.urdf -urdf -x 0 -y 0 -z 1 -model MYROBOT
如果是.xacro, 可以转化为 urdf 文件:
xacro转urdf
如果是kinetic,执行1
rosrun xacro xacro.py robot1.xacro > robot1_processed.urdf
会得到:1
2
3xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order xacro.py is deprecated; please use xacro instead
说明xacro.py命令已经过期,使用xacro替换: rosrun xacro xacro robot1.xacro > robot1_processed.urdf
如果是在Melodic,执行rosrun xacro xacro --inorder $(locate robot.urdf.xacro) > robot_inorder.urdf,结果得到1
xacro: in-order processing became default in ROS Melodic. You can drop the option.
查看关节图
先执行sudo apt install -y liburdfdom-tools1
2
3check_urdf pr2.urdf
# 再打开转换的pdf
urdf_to_graphiz pr2.urdf
查看spawn_model的所有参数,可以运行:1
rosrun gazebo_ros spawn_model -h
在 launch文件中,对于urdf可以这样编写:1
2<!-- Spawn a robot into Gazebo -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-file $(find baxter_description)/urdf/baxter.urdf -urdf -z 1 -model baxter" />
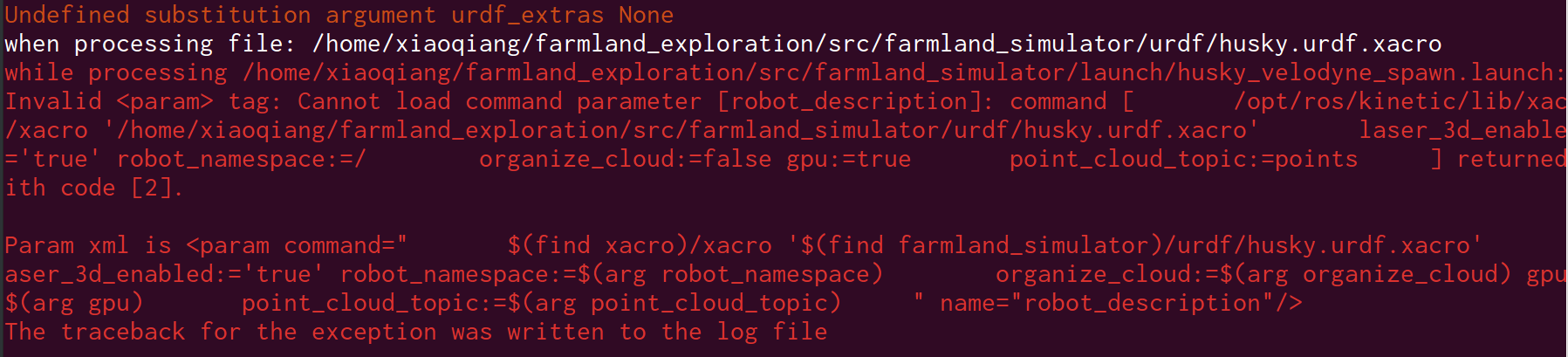
对于xacro,这样编写:1
2
3
4
5<!-- Convert an xacro and put on parameter server -->
<param name="robot_description" command="$(find xacro)/xacro.py $(find pr2_description)/robots/pr2.urdf.xacro" />
<!-- Spawn a robot into Gazebo -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-param robot_description -urdf -model pr2" />
URDF的报错原因:加了
rosrun gazebo_ros spawn_model -file robot.urdf -urdf -model robot
sdf: standard definition of world for Gazebo
1 | <launch> |
Gazebo的gui参数经常是false,这是因为显示界面会显著加大资源占用
world文件可以直接改名称,不影响使用
兼容问题
加入camera仿真
Gazebo只给出了水平FOV, 竖直FOV会根据图片的宽和高自动计算。 Gazebo有函数double VerticalFOV() const,解释: The vertical FOV is calculated from width, height, hfov。有bool SetHorizontalFOV (double _hfov)函数,但是没有函数bool SetVerticalFOV (double _hfov)
差速模块
出现下面日志,说明差速控制模块正常加载。1
2
3
4
5
6[ INFO] [1720590402.172629168, 68.803000000]: Starting plugin DiffDrive(ns = //)
[ INFO] [1720590402.172729086, 68.803000000]: DiffDrive(ns = //): <rosDebugLevel> = na
[ INFO] [1720590402.173268546, 68.803000000]: DiffDrive(ns = //): <tf_prefix> =
[ INFO] [1720590402.173831755, 68.803000000]: DiffDrive(ns = //): Try to subscribe to cmd_vel
[ INFO] [1720590402.175204165, 68.803000000]: DiffDrive(ns = //): Subscribe to cmd_vel
[ INFO] [1720590402.175652313, 68.803000000]: DiffDrive(ns = //): Advertise odom on odom