
扫描频率:转速。10Hz的含义是一秒雷达转10圈
帧率:一秒内激光雷达电机旋转的圈数,每秒完成一圈扫描的次数。一幅点云图像代表一帧,对应激光雷达内部就是电机旋转一圈完成扫描
输出点云中相邻两个点之间的夹角就是角分辨率。 水平方向上做到高分辨率不难,垂直分辨率和发射器的几何大小相关也与其排布相关。相邻两个发射器间隔越小垂直分辨率越小,禾赛的是2°
输出数据: 距离、角度、反射率、时间戳
禾赛雷达的参数,波长905nm。 最常用的波长是905nm和1550 nm。1550nm波长LiDAR传感器可以以更高的功率运行,以提高探测范围,同时对于雨雾的穿透力更强。
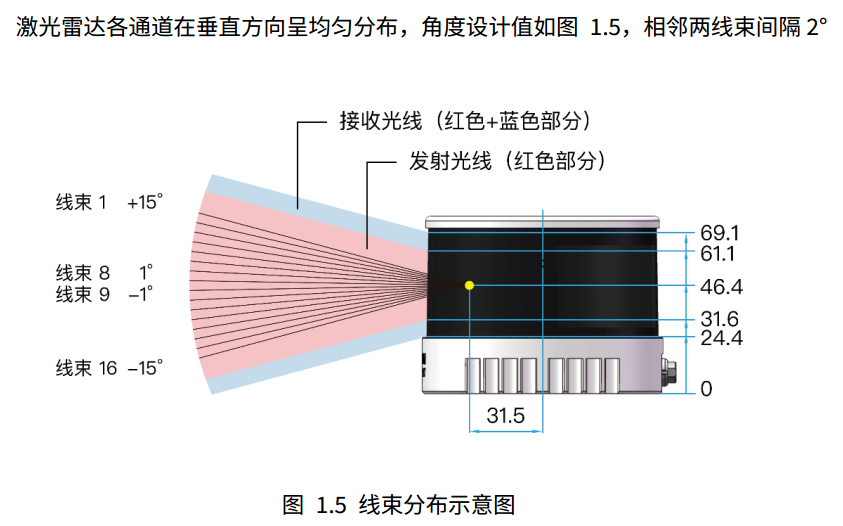
注意这是禾赛雷达,其他雷达的线束索引和角度的关系不一定是这样了,比如速腾的线束1对应-15°,线束2对应-13°,以此类推。

1 | header: |
目前把雷达坐标系设置为base_link了。
对有序点云进行操作(降采样、刚体变换)后,有序点云就会变成无序点云。velodyne雷达选择给每个点多加了一个属性ring, 详细定义如下:1
2
3
4
5
6
7
8
9
10namespace velodyne_pointcloud
{
struct PointXYZIR
{
PCL_ADD_POINT4D; // quad-word XYZ
float intensity;
uint16_t ring;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW // ensure proper alignment
} EIGEN_ALIGN16;
}; // namespace velodyne_pointcloud
这个ring表示每个点之前属于哪个线的,16线的话,这个值为0~15。并且高度自低向高排列。
通过官方的 PandarView 软件可以用于录制和播放点云数据,点击Record(工具栏上的红色圆点)即可。这样录制的包的格式是pcap。如果是velodyne雷达,可以在ROS中运行以下指令即可播放这个包rosrun velodyne_driver velodyne_node _model:=VLP16 _pcap:=/home/q/VLP16Data.pcap
驱动
型号PandarXT-16
禾赛雷达的驱动
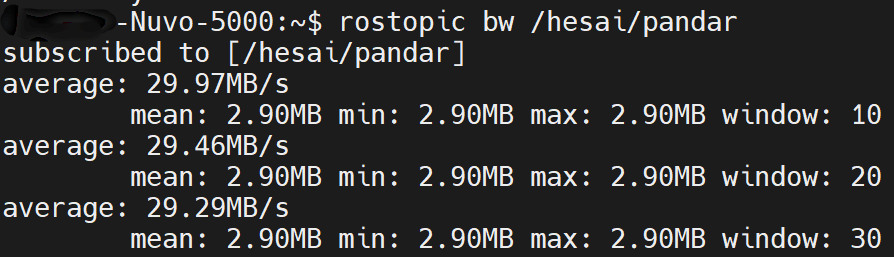
节点/hesai/hesai_lidar无订阅,发布两个话题:
- /hesai/pandar [sensor_msgs/PointCloud2] 被节点
data_pretreat_node订阅 - /hesai/pandar_packets [hesai_lidar/PandarScan],无内容
参考:
各品牌雷达的参数
Velodyne VLP-16激光雷达数据分析
Velodyne16 与禾赛Pandar XT16测试