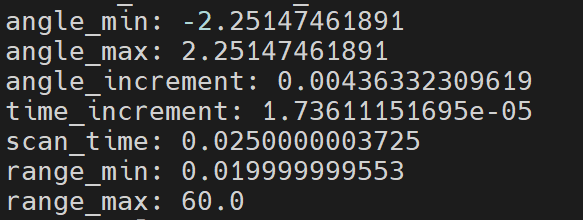
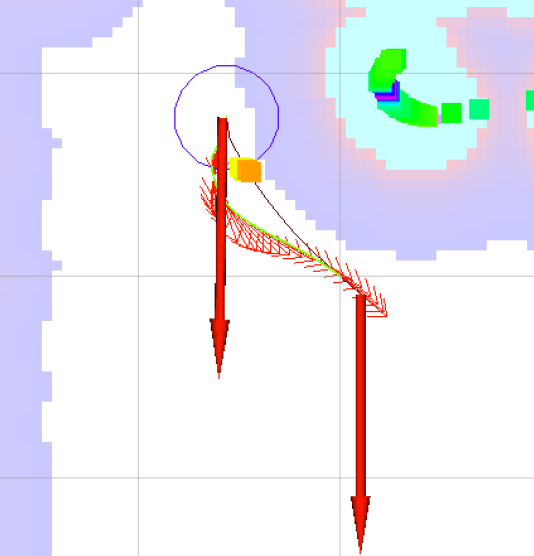
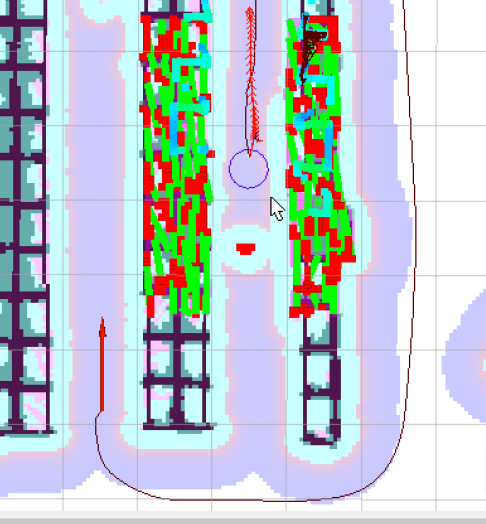
这是常见的一种情况 起初经过观察,发现在一些地方容易出现,而且是都在雷达的左侧出现,于是怀疑是雷达自身问题,最后把angle_min的绝对值改小,不再出现这个问题。雷达扫描到不存在的障碍 后来又出现这种现象,而且不分左右,有时看不出在哪边