里程计
里程计的协方差在StatusPublisher.cpp中,是个固定值:1
2
3
4
5
6
7car_status.encoder_ppr = 4 * 12 * 64;
var_angle = (0.01f / 180.0f * PI) * (0.01f / 180.0f * PI);
// speed[0] = car_status.omga_r / car_status.encoder_ppr * 2.0 * PI * wheel_radius;
// speed[1] = car_status.omga_l / car_status.encoder_ppr * 2.0 * PI * wheel_radius;
var_len = (50.0f / car_status.encoder_ppr * 2.0f * PI * wheel_radius) * (50.0f / car_status.encoder_ppr * 2.0f * PI * wheel_radius);
CarOdom.pose.covariance = boost::assign::list_of(var_len)(0)(0)(0)(0)(0)(0)(var_len)(0)(0)(0)(0)(0)(0)(999)(0)(0)(0)(0)(0)(0)(999)(0)(0)(0)(0)(0)(0)(999)(0)(0)(0)(0)(0)(0)(var_angle);
观察左右轮的编码器增量,大部分情况下都相同,不同时只差1,极少情况差2,但可以忽略。
IMU
话题xqserial_server/IMU, IMU型号为MPU9250。 /xqserial_server/IMU的协方差矩阵没有处理,所以元素全是0
里程计持续偏差以及标定IMU
过了一段时间,发现机器人启动后,什么操作没有,base_link朝向会慢慢偏离odom坐标系的x轴,echo IMU话题发现朝向一直在累计,于是按照小强的官网进行标定,等到IMU话题的朝向都是0为止,问题解决
IMU长期使用后可能不准,车静止时,发现imu/linear_acceleration如下1
2
3
4# x, y 比0多了太多
x: 0.124591998756
y: 0.00958400033414
z: 9.84276771545
一样进行标定
建图时旋转后,里程计漂移严重
建图时如果只走直线,不旋转,看不出问题,稍微旋转,map和odom坐标系的相对位姿变化很明显,不能再使用。
走正方形测里程计的累计误差
机器人直接走正方形的程序1
rosrun nav_test nav_square.py
但是我们需要先修改这个文件,因为默认的有问题。打开文件,头部添加:1
2import PyKDL
import math
紧接着添加下面内容,也就是在class NavSquare():之前:1
2
3
4
5
6
7
8
9
10
11def quat_to_angle(quat):
rot = PyKDL.Rotation.Quaternion(quat.x, quat.y, quat.z, quat.w)
return rot.GetRPY()[2]
def normalize_angle(angle):
res = angle
while res > math.pi:
res -= 2.0*math.pi
while res < -math.pi:
res += 2.0*math.pi
return res
将线速度改为0.15,角速度0.15,原来的实在太大了
从网上下载rbx1工程,这是一本教程里用到的,只把其中的rbx1_nav放到当前工作空间里,编译通过。
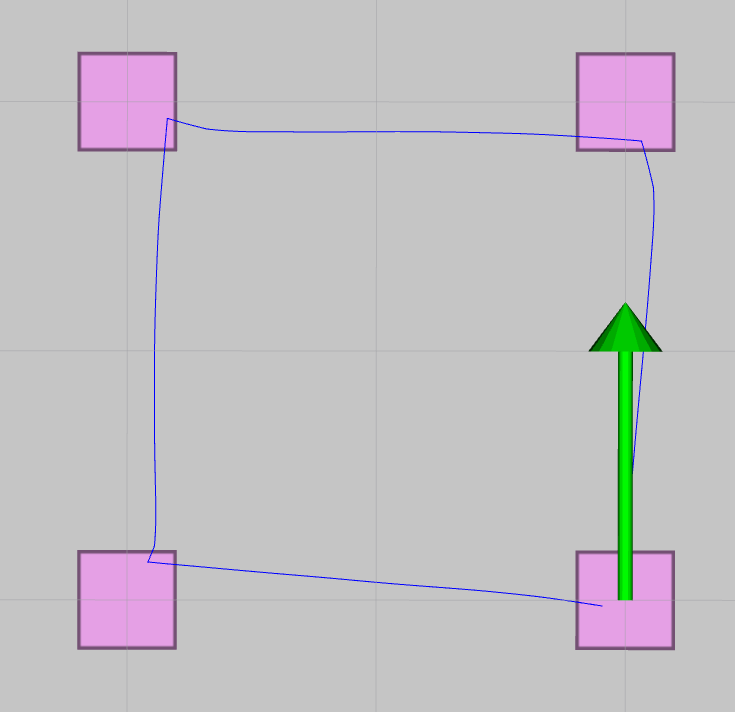
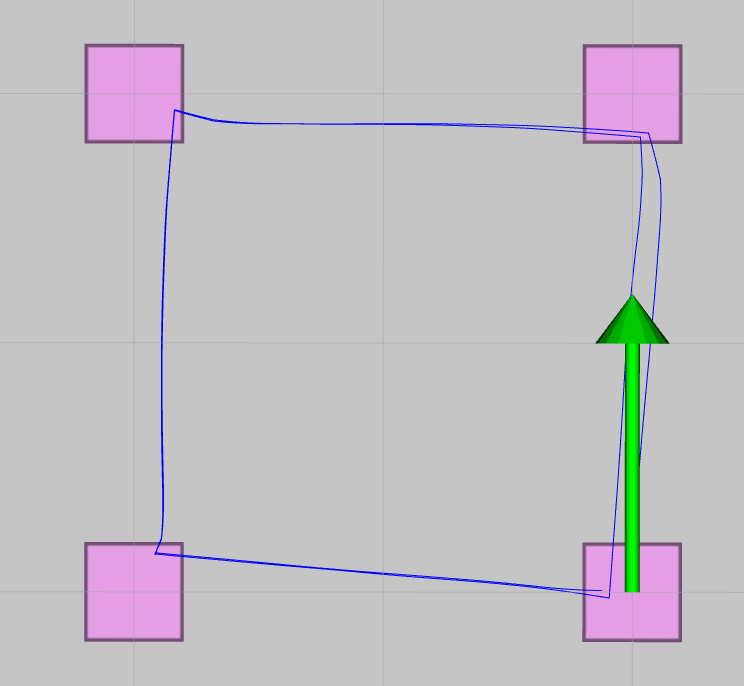
现在就可以运行了,走正方形的效果如下: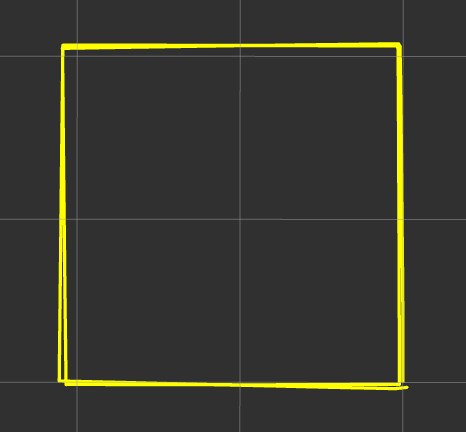
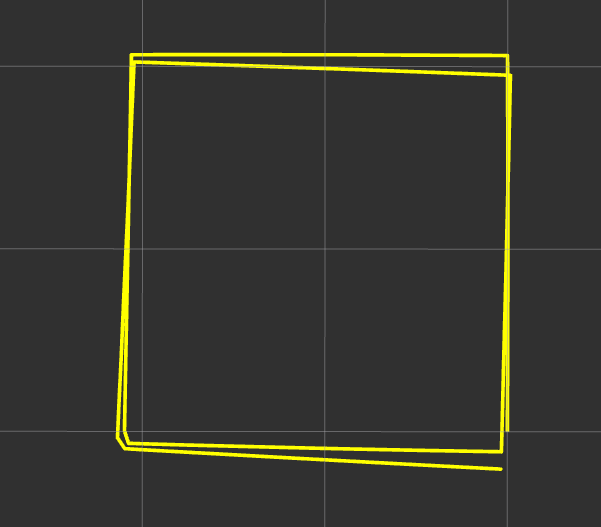
第一张图的左侧经过了一段不平的地面,明显效果不如第二张
用move_base走正方形
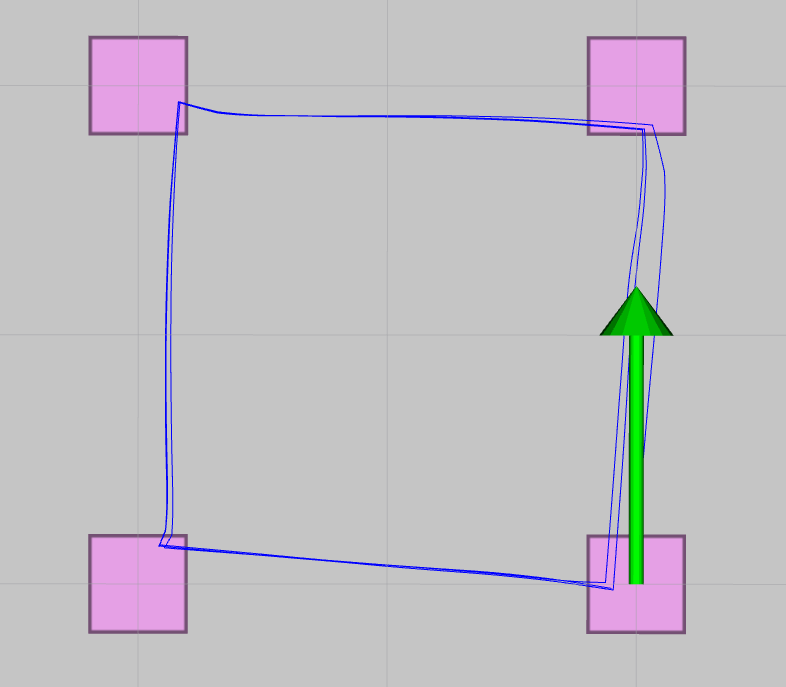
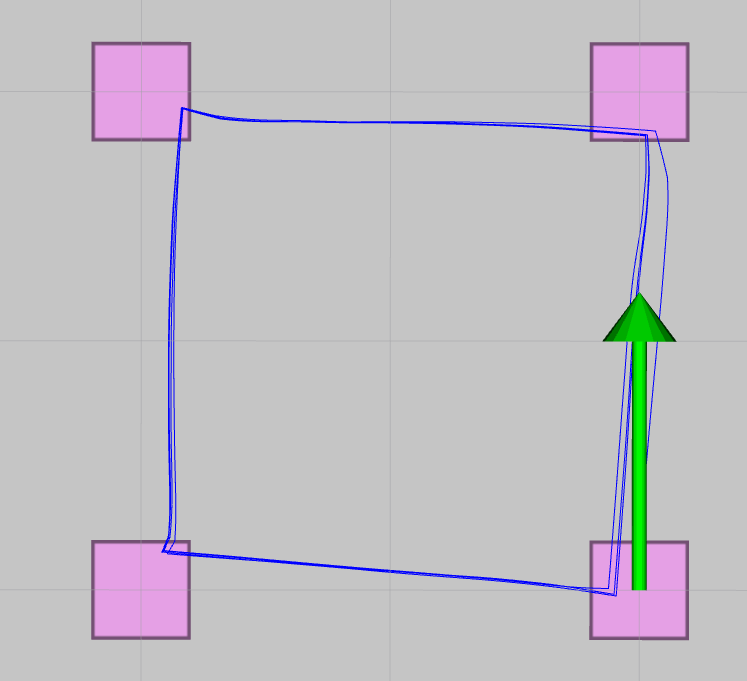
教程4里的fake_move_base_blank_map.launch其实是在一个空地图上运行了move_base的一套节点,指定odom和map坐标系的转换全是0,也就是重合. 对代价地图和算法的配置不必关心. square.py是让机器人以全局路径算法,从当前位置开始向前、向左走一个正方形,每次走一米。所以走得不是严格正方形
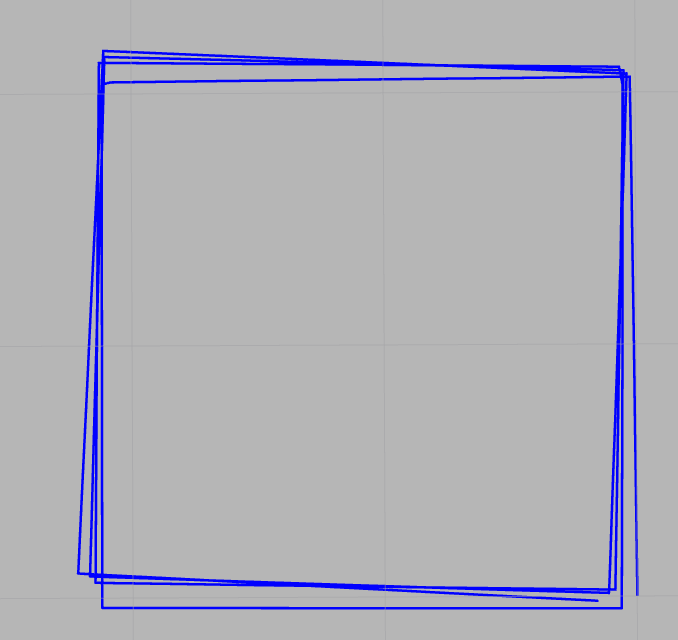
我写了一个程序,当机器人以odom为固定坐标系,base_link相对其运动时,显示运动的轨迹。再配合square.py,可以显示出小强走正方形的轨迹,连续走四次的轨迹如下: