
把Matlab编写的路径规划算法用于ROS中的自主导航,matlab也有ros的接口,可以通过话题直接把算法结果发给ROS环境,控制机器人移动
实现Matlab和ROS的通信
master可以在Matlab上,但这种需求很少,一般在Ubuntu上,下面演示从Matlab连接ROS的过程
执行setenv('ROS_MASTER_URI','http://192.168.1.7:11311'),IP为master
然后执行rosinit,正常的话会出现下面提示:1
2The value of the ROS_MASTER_URI environment variable, http://192.168.1.7:11311, will be used to connect to the ROS master.
Initializing global node /matlab_global_node_37037 with NodeURI http://192.168.1.8:20811/
现在二者通信成功了,可以使用rosnodel list等命令了。但是与标准的ROS命令有所不同,以下列出常用的几个: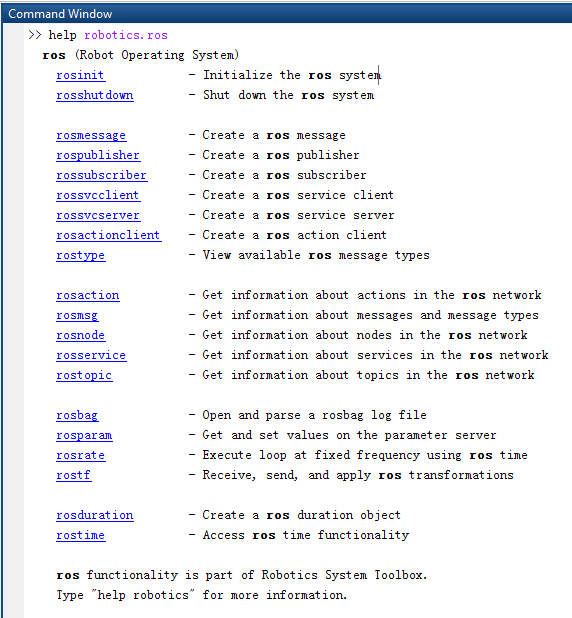
rosshutdown用于退出ROS网络,在此之后Matlab和ROS不再通信。
参考:Matlab中的ROS