
用于估计的二轮差速里程计模型
二轮差速模型的航迹推演原理图,后方两个驱动轮,前面两个万向轮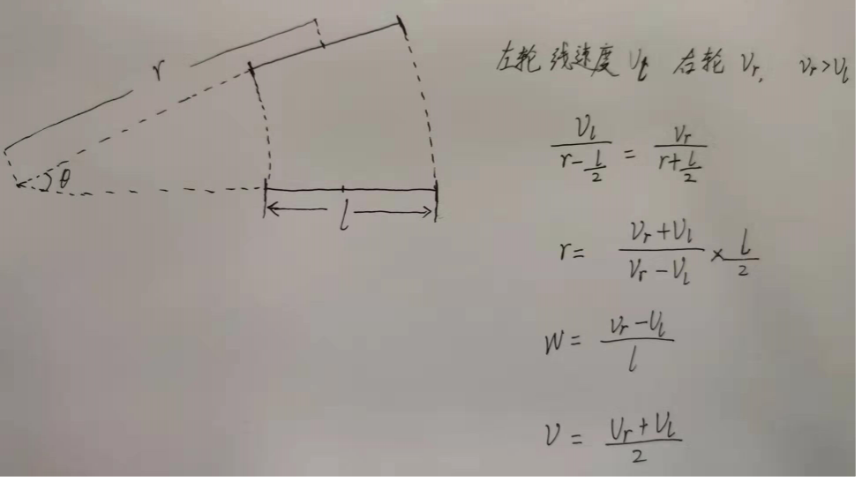
- IMU只提供yaw
- 根据航迹推演,两驱车的线速度是两个轮子线速度的平均值,角速度是 差/底盘长度;两个参数作为
raw_vel话题发布 - 机器人切线运动模型
base_controller节点正确读取到底层(比如嵌入式控制板)传回的速度后进行积分,计算出机器人的估计位置和姿态,并将里程计信息和tf变换发布出去。 - 机器人中通过运行底盘控制ROS驱动,来实现读取串口的速度反馈,利用航迹推演算法计算得到里程计并发布到/odom这个主题
之所以说这个是粗略的定位,是因为在实际情况中可能会碰到轮子打滑,地面不平整等因素的干扰,里程计的运动增量带有噪声,对速度积分进行航迹推算得到的里程计累积误差会越来越大。当然上层会通过激光信息来匹配校准。
IMU姿态的协方差矩阵代表了姿态测量的不确定度。