
可以参考
如何在环境轮廓建图完成之后,继续完善地图细节
SLAMTEC激光建图传感器使用技巧
建地图时,最好雷达面对墙壁,小车逐渐倒退来完善地图,不要让小车正面对着墙壁和空旷环境前进,在某部分环境建地图后,可以让小车正面前进。
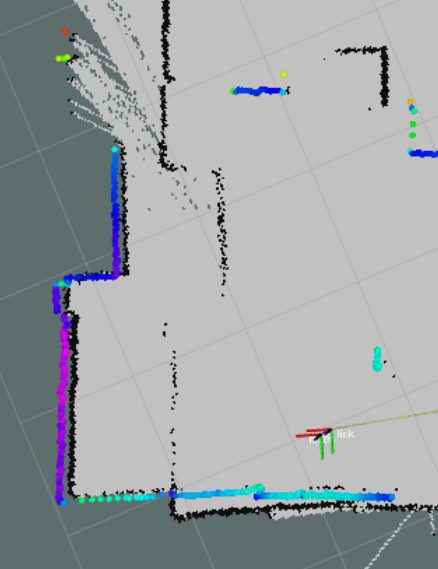
绘制的地图,黑线(墙)周围的黑点越少越好,毛刺越少越好,漏光线的环境会出现很长的白线,蓝色的块是避障保护区。
建图时出现重影
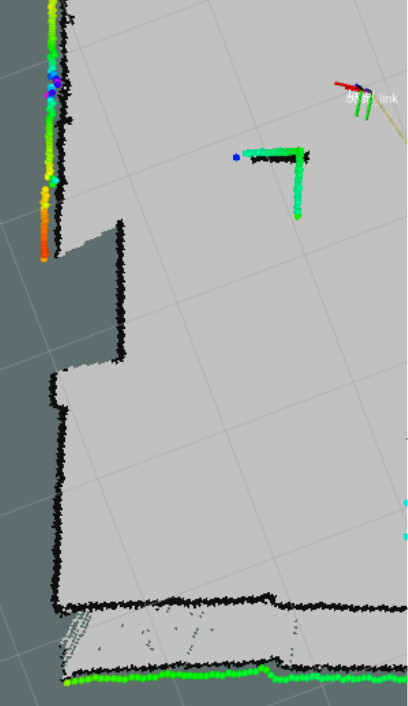
一般有两个方面的原因:
- 里程计累计误差
- 建图数据的时间戳可能没有对齐。
一般第一种比较常见,比如说编码器是否存在丢失脉冲的情况、换个比较坚硬的地面跑一跑看看建图效果。第二种比较难排查,最好能够录下数据查看。