
AMCL定位偶尔会出现定位不准的情况,推测是由于工控机性能不足(粒子滤波很耗时)或地图上大特征较少/小特征较多(其总体结果有随机分布倾向),造成AMCL无法及时定位
AMCL中,粒子很分散,定位置信度就很低。如果置信度太低,定位不准,可以停掉导航模块,先通知上层进行重定位。
amcl用到的话题和服务
话题
机器人稍微运动后,amcl节点开始读取scan,map,tf话题上的数据, 在重采样之后发布话题 amcl_pose, 平时小车不发布位姿坐标的,而重采样的触发条件是里程计显示小车参数update_min_d或者旋转参数update_min_a。我平时获取小车位姿用的是话题robot_pose,它来自robot_pose_publisher包,发布频率是10Hz
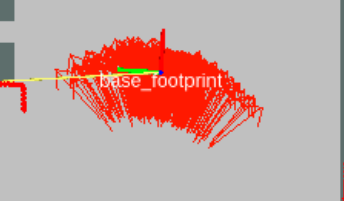
rviz中的particlecloud话题: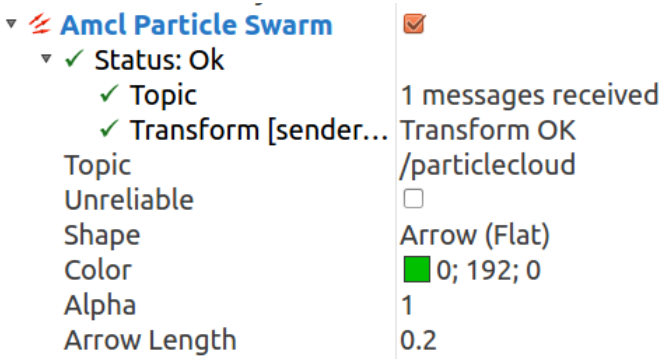
消息类型是geometry_msgs/PoseArray,由/amcl发布,被rviz订阅。作用是在rviz中显示机器人的可能位置,就是这样的一坨: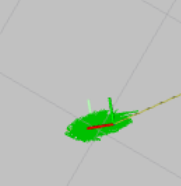
amcl还订阅了一个话题initialpose,但是我发现它没有发布者,看来是供用户发布的。
服务
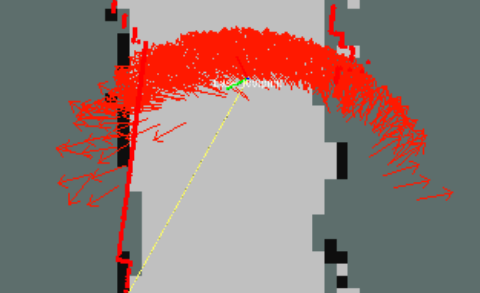
服务global_localization,类型为std_srvs/Empty,初始化全局定位,使所有粒子在地图的自由空间上随机分散,也就是像这样:
call这个服务其实就相当于重新初始化了粒子位置,用于amcl的重新定位,但是我尝试移动机器人,定位经常是错误的。
服务static_map,类型nav_msgs/GetMap,它是由map_server发布的,用于获得地图数据进行定位。所以说amcl离不开map_server,其消息成员:1
2---
nav_msgs/OccupancyGrid map
很简单,请求为空,响应就是地图数据
request_nomotion_update服务,该服务是手动的来更新粒子并发布新的粒子,可以使用如下命令来调用服务执行更新粒子的操作,该服务一般需要多次调用才能逐渐看到粒子收敛的效果:1
rosservice call request_nomotion_update "{}"
本质上是让m_force_update为true,进行强制粒子滤波
机器人准确定位
机器人定位需要的信息:
- 雷达扫描数据
- 里程计数据
- 扫描地图数据(不是静态地图)
- odom->base_link->laser的tf变换
初始点位姿参数有6个,均在handleMapMessage函数中使用,最终是在 pf_pdf_gaussian_sample函数
每次电脑重启后,在同一个点的坐标是不同的,每次都要手动定位。可以在amcl.launch中设置机器人初始化数据。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17<!--初始位姿均值(x),用于初始化高斯分布滤波器。0.0 -->
<param name="initial_pose_x" value="-3.13841"/>
<!--初始位姿均值(y),用于初始化高斯分布滤波器。 0.0-->
<param name="initial_pose_y" value="2.20967"/>
<!--初始位姿均值(yaw),用于初始化高斯分布滤波器。 -->
<param name="initial_pose_a" value="2.611510"/>
<!--初始位姿协方差(x*x),用于初始化高斯分布滤波器。 -->
<param name="initial_cov_xx" value="0.5*0.5"/>
<!--初始位姿协方差(y*y),用于初始化高斯分布滤波器。 -->
<param name="initial_cov_yy" value="0.5*0.5"/>
<!--初始位姿协方差(yaw*yaw),撒粒子的方差,使粒子均匀的围绕初始化点,用于初始化高斯分布滤波器 -->
<param name="initial_cov_aa" value="(π/12)*(π/12)"/>
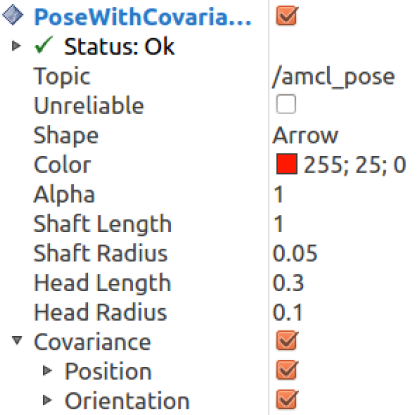
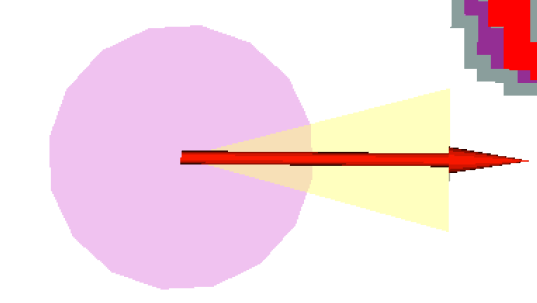
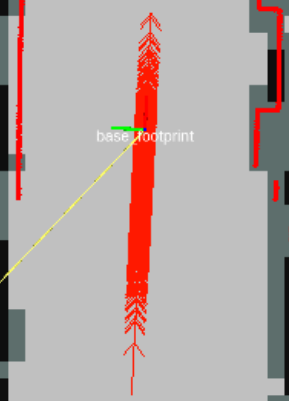
粒子收敛会使得covariance参数变小: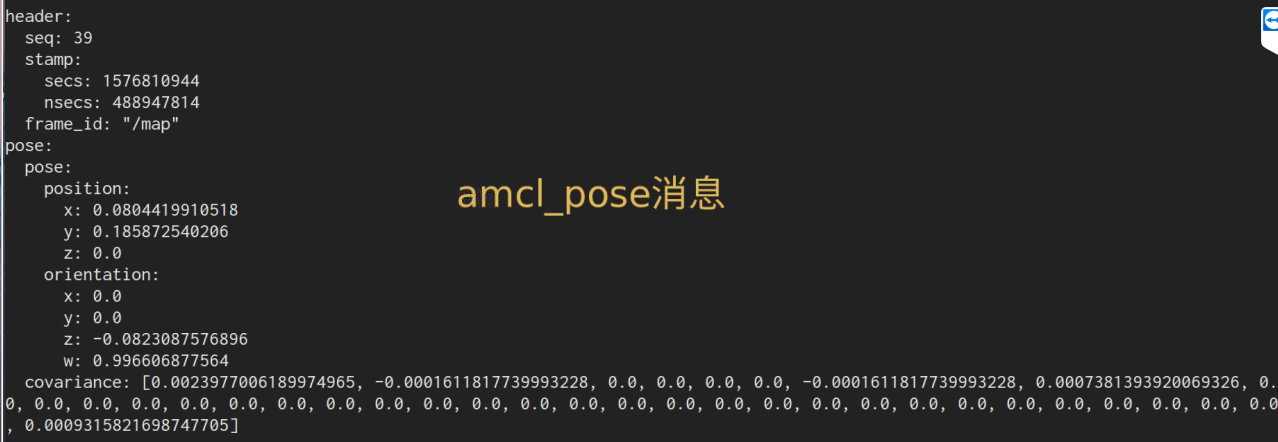
covariance是一个6x6的协方差矩阵,6个状态量是x,y,z,绕x轴的旋转(roll),绕y轴的旋转(pitch),绕z轴的旋转(yaw)。矩阵对角线的6个元素就是6个状态量的方差,由于z,pitch,roll都是0,所以只看第1,2和最后的元素,也就是矩阵的第1,8和最后的元素,分别是x,y,yaw的方差
在pf_pdf_gaussian_alloc函数中,对协方差矩阵进行了特征值分解。也就是协方差矩阵cx=cr cd crT ,cd是对角矩阵,取cd的三个对角元素开平方后,传入pf_ran_gaussian函数,作为set_a粒子集的初始化的标准差。yaw的方差在对角矩阵cd里不变,cd的最后一个元素仍然是initial_cov_aa
主要是前三项参数,在建好地图后,选择一个启动点的坐标,将朝向转换获得yaw,以后每次启动机器人时,都要让机器人在这个位姿。因为每次启动move_base.launch后,只调整机器人位姿无法定位准确,还需要rviz手动定位,有了这个初始位姿之后,不必rviz手动定位了,只调整机器人位姿就可以了,调整方式是先让机器人到某个点。
在机器人移动时,才会发布/amcl_pose的消息,类型为geometry_msgs/PoseWithCovarianceStamped,也就是带协方差的消息。robot_pose_publisher发布了/base_link坐标系和/map坐标系的转换, 一般放在机器人开机启动的节点里,发布话题robot_pose(geometry_msgs/Pose)。常用这两个话题获取机器人当前位置
在远离初始点的位置,执行rosparam get amcl/initial_pose_x,发现它的值实际是当前的位姿x坐标, 而不是amcl.launch中的参数了,显然是参数服务器在更新这个参数
amcl参数
蓝色的是需要自己修改的
滤波器参数
handleMapMessage函数中的pf_alloc所用:
- min_particles和max_particles 是允许的粒子数量的最小值和最大值,也就是在rviz里看到的箭头数量。分别对应程序里的变量
min_samples和max_samples。前者默认100,后者默认5000。原则上越大,定位精度越好,但会影响占用的CPU
AMCL收敛速度不够快,在初值比较好的情况下,如果设置min_particles为300,max_particles为5000,重采样需要14~20次才能收敛到300个粒子。如果设置得更小,收敛速度就更慢。 重采样几次时,有的粒子权重还是另一些粒子权重的三四倍。
min_particles不能太大,应该比pf_resample_limit函数返回值小,否则set_b偏大,位姿不够精确。 我见过pf_resample_limit最小返回值是66,一般都大于100,所以min_particles取100即可。
max_particles不能太小,一方面难以筛选权重大的粒子,另一方面在初值不太准确时,粒子集不能有效覆盖真实初值的的周边。但也不能太大,否则占用CPU上升。经过反复试验,max_particles取3000,此时AMCL占用CPU 2%左右
- kld_err: 初始粒子真实分布和估计分布之间的最大误差,默认0.01
kld_z: 上标准分位数(1-p),其中p是估计分布上误差小于kld_err的概率,默认0.99,但实际在
pf_alloc为3recovery_alpha_slow: 慢速的平均权重滤波的指数衰减频率,用作决定什么时候通过增加随机位姿来recover,默认0(disable),可能0.001是一个不错的值
- recovery_alpha_fast: 快速的平均权重滤波的指数衰减频率,用作决定什么时候通过增加随机位姿来recover,默认0(disable),可能0.1是个不错的值
这两个参数在AMCL失效恢复中,用于短期和长期的似然平均,要求 0 < alpha_slow << alpha_fast,用于计算w_slow和w_fast,最终判断是否触发recover机制,增加随机位姿, 用以削弱粒子滤波器的粒子匮乏问题的影响。
运动模型准备工作中所用:
- update_min_d : 在执行滤波更新前平移运动的最小距离,默认0.2m,可改为0.05
- update_min_a: 执行滤波更新前旋转的最小角度,单位弧度,默认 pi/6
重采样所用:
- resample_interval : 在重采样前需要等待的滤波次数,只能是大于1的整数,默认2。越大,重采样频率越低
源码里对应:1
2
3
4
5if( !(++resample_count_ % resample_interval_) )
{
pf_update_resample(pf_);
resampled = true;
}
这段在laserReceived回调里,resample_count_初始化为0,每次回调一次就增加一次,所以resample_interval越大,重采样频率越低。
如何接受地图数据:
- use_map_topic: 导航时设置为false。 当设置为true时,AMCL将会订阅map话题,而不是调用服务返回地图。也就是说,当设置为true时,有另外一个节点实时的发布map话题,也就是机器人在实时的进行地图构建,并供给amcl话题使用;当设置为false时,通过map server,也就是调用已经构建完成的地图
first_map_only: 用于mapReceived函数,可以不看。当设置为true时,AMCL将仅仅使用订阅的第一个地图,而不是每次接收到新的时更新为一个新的地图,导航时设置为false
transform_tolerance: tf变换发布推迟的时间,为了说明tf变换在未来时间内是可用的,默认0.1
- gui_publish_rate: 扫描和路径发布到可视化软件的最大频率,默认参数-1.0表示disable,可以设置为10
- save_pose_rate: 存储上一次估计的位姿和协方差到参数服务器的最大速率。被保存的位姿将会用在连续的运动上来初始化滤波器。默认参数-1.0表示disable,可以用0.5
激光模型参数,都在测量模型中使用
laser_model_type: 模型使用,可以是beam, likehood_field, likehood_field_prob(和likehood_field一样但是融合了beamskip特征),默认是 likehood_field
laser_min_range: 被考虑的最小扫描范围;默认参数-1.0,将会使用激光上报的最小扫描范围
- laser_max_range: 被考虑的最大扫描范围;默认参数-1.0时,将会使用激光上报的最大扫描范围
laser_max_beams: 更新滤波器时,每次扫描中多少个等间距的光束被使用,默认30
laser_z_hit: 似然域模型的高斯噪声的最大权值,默认0.95
- laser_z_rand: 似然域模型的随机噪声的最大权值,默认0.05
- laser_sigma_hit: 高斯噪声模型的标准差,默认0.2m
以下几个参数不在似然域模型中使用:
- laser_z_short: 模型的z_short部分的最大权值,默认0.1
- laser_z_max: 模型的z_max部分的最大权值,默认0.05
- laser_lambda_short: 模型z_short部分的指数衰减参数,默认0.1
- laser_likehood_max_dist: 地图上做障碍物膨胀的最大距离,用作likehood_field模型,默认2m
里程计模型参数,都在运动模型部分使用
- odom_model_type: 模型使用,默认diff,还可以是omni(全向轮), diff-corrected, omni-corrected,后面两个是对老版本里程计模型的矫正,相应的里程计参数需要做一定的减小。一般用diff
- odom_alpha1 : 指定由机器人运动部分的旋转分量估计的里程计旋转的期望噪声,默认0.2。增大该值,机器人发生有旋转运动时,就会出现扇形噪声粒子云
- odom_alpha2: 指定由机器人运动部分的平移分量估计的里程计旋转的期望噪声,默认0.2
- odom_alpha3: 指定由机器人运动部分的平移分量估计的里程计平移的期望噪声,默认0.2。纵向分量运动噪声,沿着机器人前进方向分布
- odom_alpha4: 指定由机器人运动部分的旋转分量估计的里程计平移的期望噪声,默认0.2。斜角方向上的运动噪声

odom_alpha5: 平移相关的噪声参数(仅用于模型是omni的情况),默认0.1
odom_frame_id: 里程计默认使用的坐标系,默认odom
- base_frame_id: 机器人的基坐标系,默认base_link
- global_frame_id: 由定位系统发布的坐标系名称,默认map
- tf_broadcast: 设置为false会阻止amcl发布全局坐标系和里程计坐标系之间的tf变换,一般为true