1
2
3
4
5
6
7
8
| problem->AddResidualBlock(
LandmarkCostFunction2D::CreateAutoDiffCostFunction(
observation, prev->data, next->data),
new ceres::HuberLoss(huber_scale),
prev_node_pose->data(), next_node_pose->data(),
C_landmarks->at(landmark_id).rotation(),
C_landmarks->at(landmark_id).translation() );
|
CreateAutoDiffCostFunction
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| static ceres::CostFunction* CreateAutoDiffCostFunction(
const LandmarkObservation& observation, const NodeSpec2D& prev_node,
const NodeSpec2D& next_node)
{
return new ceres::AutoDiffCostFunction<
LandmarkCostFunction2D,
6 ,
3 ,
3 ,
4 ,
3 >(
new LandmarkCostFunction2D(observation, prev_node, next_node));
}
|
operator
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
| template <typename T>
bool operator()(const T* const prev_node_pose, const T* const next_node_pose,
const T* const landmark_rotation,
const T* const landmark_translation,
T* const e) const
{
const std::tuple<std::array<T, 4>, std::array<T, 3>>
interpolated_rotation_and_translation = InterpolateNodes2D(
prev_node_pose, prev_node_gravity_alignment_, next_node_pose,
next_node_gravity_alignment_, interpolation_parameter_);
const std::array<T, 6> error = ScaleError(
ComputeUnscaledError(
landmark_to_tracking_transform_,
std::get<0>(interpolated_rotation_and_translation).data(),
std::get<1>(interpolated_rotation_and_translation).data(),
landmark_rotation, landmark_translation),
translation_weight_, rotation_weight_);
std::copy(std::begin(error), std::end(error), e);
return true;
}
|
ComputeUnscaledError
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
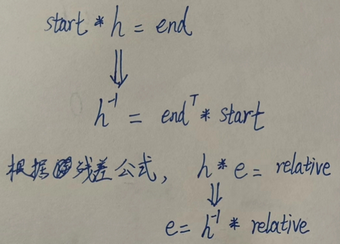
| template <typename T>
static std::array<T, 6> ComputeUnscaledError(
const transform::Rigid3d& relative_pose,
const T* const start_rotation, const T* const start_translation,
const T* const end_rotation, const T* const end_translation )
{
const Eigen::Quaternion<T> R_i_inverse( start_rotation[0],
-start_rotation[1],
-start_rotation[2],
-start_rotation[3] );
const Eigen::Matrix<T, 3, 1> delta(end_translation[0] - start_translation[0],
end_translation[1] - start_translation[1],
end_translation[2] - start_translation[2]);
const Eigen::Matrix<T, 3, 1> h_translation = R_i_inverse * delta;
const Eigen::Quaternion<T> h_rotation_inverse =
Eigen::Quaternion<T>(end_rotation[0], -end_rotation[1],
-end_rotation[2], -end_rotation[3]) *
Eigen::Quaternion<T>(start_rotation[0], start_rotation[1],
start_rotation[2], start_rotation[3]);
const Eigen::Matrix<T, 3, 1> angle_axis_difference =
transform::RotationQuaternionToAngleAxisVector(
h_rotation_inverse * relative_pose.rotation().cast<T>());
return { {T(relative_pose.translation().x()) - h_translation[0],
T(relative_pose.translation().y()) - h_translation[1],
T(relative_pose.translation().z()) - h_translation[2],
angle_axis_difference[0],
angle_axis_difference[1],
angle_axis_difference[2]} };
}
|
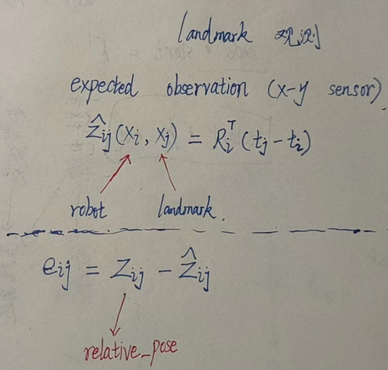
relative_pose 是 landmark_to_tracking_transform,landmark和tracking坐标系的相对位姿,在SensorBridge::HandleLandmarkMessage中获得
landmark作为独立变量进入Pose Graph的稀疏优化,它增加的优化维度是 landmarks个数 * 每个landmark的参数个数,不要使用太多landmark
ScaleError一看就是残差乘以权重
1
2
3
4
5
6
7
8
9
10
11
| template <typename T>
std::array<T, 3> ScaleError( const std::array<T, 3>& error,
double translation_weight,
double rotation_weight )
{
return {{
error[0] * translation_weight,
error[1] * translation_weight,
error[2] * rotation_weight
}};
}
|
