
双目
代表:图漾, Astro Dabai, ZED
结构光
代表: OAK, 奥比中光, Realsense
Xvisio相机
按照指导书进行配置即可,需要注意的只有noetic的配置有些不同。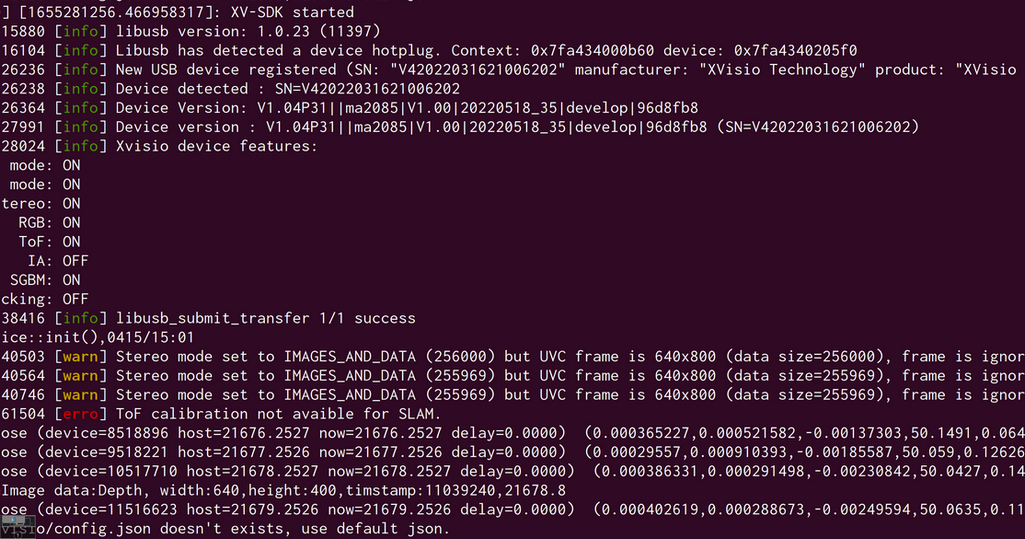
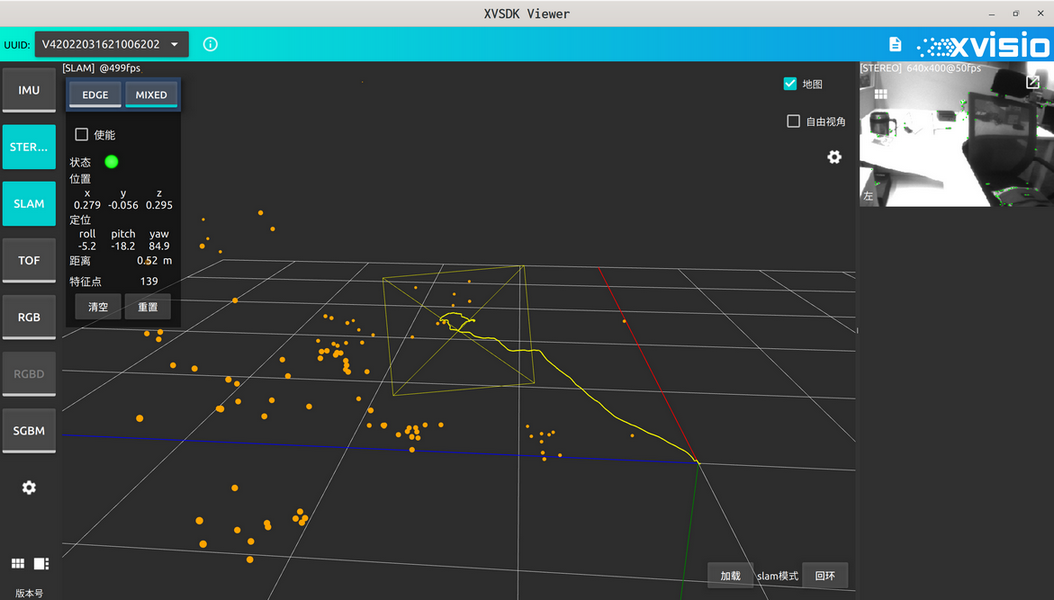
我模仿驱动里的demo-api,写了一个程序获得SLAM位姿,跟xvisio_viewer的效果相同。发布的话题vslam_pose的频率足够满足需求。
xvisio相机启动时,必须面对有特征的环境,否则之后会一直不能获取SLAM信息。在相机移动过程中也要尽量面对有特征环境,如果面对纯色的环境,会失败,和遮挡镜头是一样的。 但即使这样,偶尔也有失败的情况。
反复测试后,感觉这个相机不适合我的需求,只好放弃了。
奥比中光-大白相机
我直接修改了奥比相机的驱动,从源头直通滤波、体素滤波、统计滤波。否则比较远的点云(比如3m以上)乱七八糟还极不稳定,根本不需要。另外两个方向的点云,坐标值比较大的时候,也极不稳定,没有使用的必要。
原始点云256000个点,滤波后,最多20000+个点。
装在机器人上,移动时,偶尔收不到点云数据
realsense D435f
比D435增加一个750nm 近红外滤光片(厚度0.5mm, CLAREX NIR-75N),一个mask。 红外滤光片(IR pass filter)装在相机的前端,两个孔对应红外发射和RGB相机。减少了光反射和阳光引起的深度噪声,它可传播近红外光和吸收可见光。
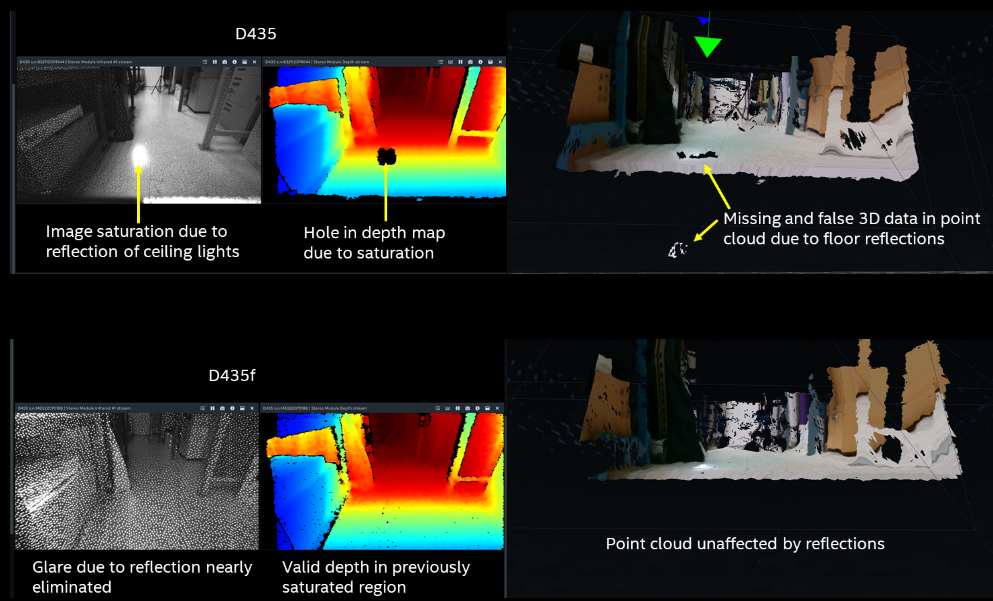
我做了很多试验,发现D435f确实好很多,不仅在阳光和有光反射情况下,连普通环境也减少了空洞现象。
D435f的射程收到红外发射器的限制,校正可能需要额外的红外补光。
考虑自己买750nm的滤光片装在D435上,淘宝发现很小的一块要80,真是贵。
参考: realsense-d435f
肇观电子的N1(价格 350)和M1(价格 750)相机
M1 主动双目,空洞率少。 N1 被动双目,空洞太多,想使用深度图和点云就不必考虑了。

