
cartographer_offline_node对应offline_node_main.cc,它和cartographer_grpc_offline_node对应的offline_node_grpc_main.cc极为相似
在线和离线的建图效果无区别。离线节点直接从bag读取传感器数据,使用了CPU能实现的最大速度处理bag,而且不会丢失消息,不过无法设置速度和看不清建图过程的细节。 如果想控制处理速度,就使用在线节点和rosbag play -r 2,但是如果设置速度太快,可能会丢失消息,这是很常见的。
简单看了源码,离线节点之所以运行快,是因为使用了ROS多线程ros::AsyncSpinner,而在线节点还是普通的ROS程序
运行示例
1 | wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/b2-2016-04-05-14-44-52.bag |
此时的CPU占用果然要爆了,所以说只适合运行数据集,不适合需要优化cartographer的场合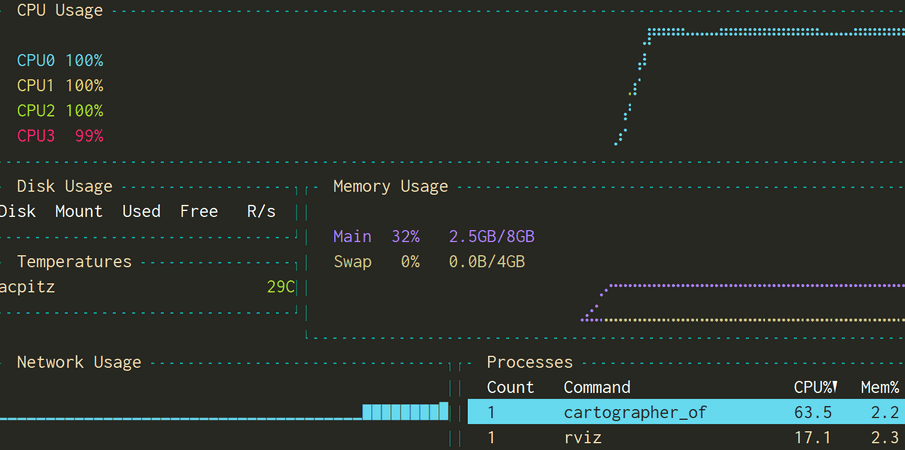
1 |
|
参数
RunOfflineNode函数转到了offline_node.cc,这个文件主要就是这个函数。这个文件开头是一堆宏定义,根据字符串解释每个可用的参数
- configuration_directory
- configuration_basenames
load_state_filename
bag_filenames: Comma-separated list of bags to process. One bag per trajectory. Any combination of simultaneous and sequential bags is supported.
urdf_filenames: Comma-separated list of one or more URDF files that contain. static links for the sensor configurations
use_bag_transforms: 默认true,Whether to read, use and republish transforms from bags
keep_running: 默认false,最好改为true。Keep running the offline node after all messages from the bag have been processed
load_frozen_state: 默认true,Load the saved state as frozen (non-optimized) trajectories
skip_seconds: 默认0,Optional amount of seconds to skip from the beginning (i.e. when the earliest bag starts)
一个配置了两个机器人的的launch的关键部分是这样的:1
2
3
4
5
6
7
8
9
10
11
12
13
14<node name="cartographer_offline_node" pkg="cartographer_ros"
required="$(arg no_rviz)"
type="cartographer_offline_node" args="
-configuration_directory $(arg abspath)
-configuration_basenames alpha-cartographer.lua,delta-cartographer.lua
-urdf_filenames $(arg abspath)/pioneer-alpha.urdf,$(arg abspath)/pioneer-delta.urdf
-bag_filenames $(arg abspath)/alpha.bag,$(arg abspath)/delta.bag
-keep_running=true -use_bag_transforms=false"
output="screen">
<remap from="bag_1_scan" to="alpha/scan" />
<remap from="bag_1_odom" to="alpha/pose" />
<remap from="bag_2_scan" to="delta/scan" />
<remap from="bag_2_odom" to="delta/pose" />
</node>
话题和service
Publications:
- cartographer_offline_node/bagfile_progress [cartographer_ros_msgs/BagfileProgress]
- clock [rosgraph_msgs/Clock]
- constraint_list [visualization_msgs/MarkerArray]
- landmark_poses_list [visualization_msgs/MarkerArray]
- rosout [rosgraph_msgs/Log]
- scan_matched_points2 [sensor_msgs/PointCloud2]
- submap_list [cartographer_ros_msgs/SubmapList]
- tf [tf2_msgs/TFMessage]
- tf_static [tf2_msgs/TFMessage]
- tracked_pose [geometry_msgs/PoseStamped]
- trajectory_node_list [visualization_msgs/MarkerArray]
Subscriptions:
- clock [rosgraph_msgs/Clock]
Services:
- finish_trajectory
- get_trajectory_states
- read_metrics
- start_trajectory
- submap_query
- trajectory_query
- write_state
离线节点是直接在程序里读取消息,所以它没有像rosbag play那样把bag里的话题发布出来,我运行bag时,因为还需要运行一个节点对bag里的话题进行类型转换,而话题又没发布出来,所以离线节点实际无法使用了。
源码的重要部分
1 | constexpr char kClockTopic[] = "clock"; |