
hector相当于cartographer的前端,没有闭环检测,利用高斯牛顿方法来解决scan-matching的问题。它要求激光雷达的扫描频率比较高,建图时机器人速度需要很慢,但在机器人快速转弯时容易发生错误,原因在于优化算法容易陷入局部最小值。使用了多分辨率地图,也可以没有里程计。
论文的新颖点在于scanMatch使用高斯牛顿法以及多分辨率地图,后来被cartographer借鉴。
缺点
- hector的计算太慢了,只进行扫描匹配的操作就要花费大概0.1秒钟,这就导致即使雷达频率再高,hector也处理不过来
- hector的地图不能自动更改大小,地图的大小在初始化之后始终是固定的
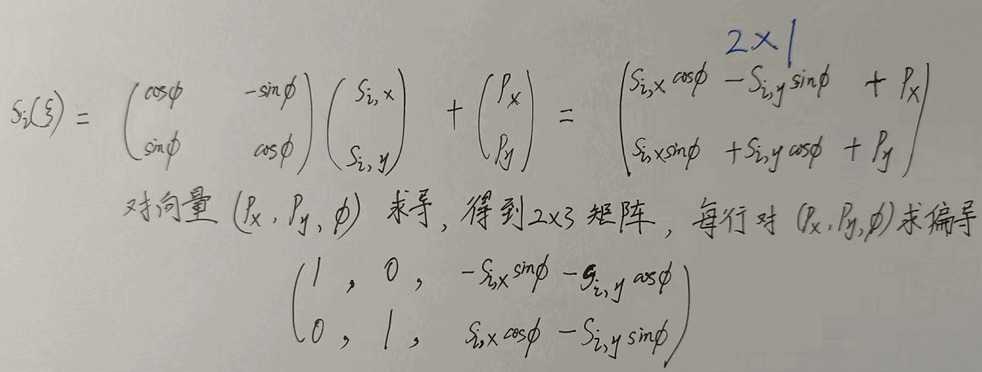
- 适用于非光滑线性逼近的地图梯度∇M(Si(ε)),这意味着不能保证局部二次收敛到最小,但该算法在实践中精度较高。