
车收到导航命令没有动,查日志如下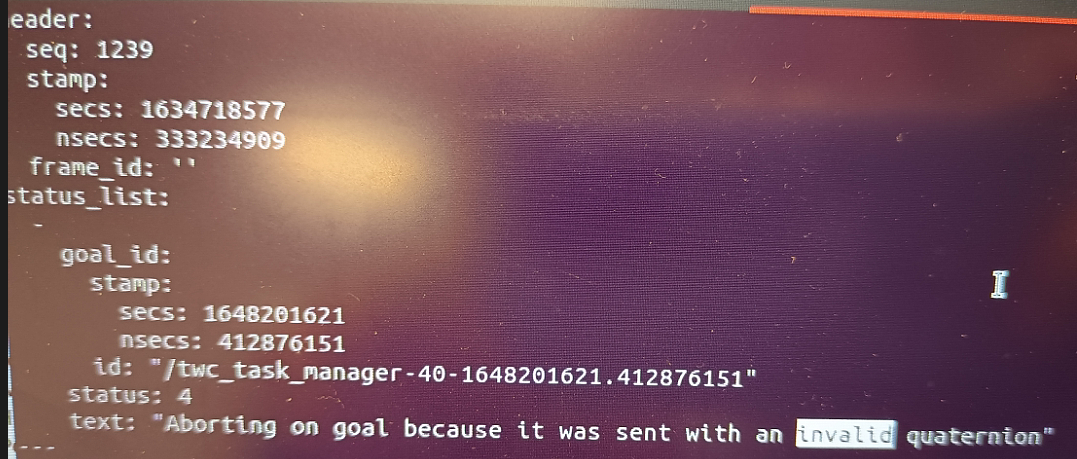
在一个客户端程序里,在sendGoal之前调用了两次cancelAllGoals,结果得到下面的日志,某次goal的消息全是01
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68[ INFO] [1648276976.479444090]: move_base client send goal: type: 1
target_pose:
header:
seq: 11
stamp: 1648276976.479361050
frame_id: map
pose:
position:
x: -3.9901
y: 0.427604
z: 0
orientation:
x: 0
y: 0
z: 0
w: 1
[ INFO] [1648276976.492017723]: move base task just went active
[ WARN] [1648276979.458537608]: 32 receive cmd: position:
x: -4.01633
y: 0.440816
z: 0
orientation:
x: 0
y: 0
z: 0
w: 1
[ INFO] [1648276979.494004129]: actionlib result state: PREEMPTED
[ INFO] [1648276979.494157917]: actionlib result: result: 0
result_pose:
header:
seq: 0
stamp: 0.000000000
frame_id:
pose:
position:
x: 0
y: 0
z: 0
orientation:
x: 0
y: 0
z: 0
w: 0
[ INFO] [1648276979.494228945]: actionDoneCb state PREEMPTED
[ INFO] [1648276979.494308493]: move_base client send goal: type: 1
target_pose:
header:
seq: 12
stamp: 1648276979.494253319
frame_id: map
pose:
position:
x: 0
y: 0
z: 0
orientation:
x: 0
y: 0
z: 0
w: 0
[ERROR] [1648276979.504876032]: BUG: Got a transition to CommState [PENDING] when our in SimpleGoalState [DONE]
[ERROR] [1648276979.504963821]: BUG: Got a transition to CommState [RECALLING] when our in SimpleGoalState [DONE]
[ERROR] [1648276979.514087412]: BUG: Got a transition to CommState [PREEMPTING] when in SimpleGoalState [DONE]
[ERROR] [1648276979.515084871]: BUG: Got a second transition to DONE
结果导致move_base漏接了一个目标,最后取消两个cancelAllGoals就好了
cancelAllGoals()[inline]: Cancel all goals currently running on the action server. This preempts all goals running on the action server at the point that this message is serviced by the ActionServer.cancelGoal()[inline]: Cancel the goal that we are currently pursuing
cancellAllGoals()和cancellGoal()经常放在SIGINT信号的回调函数里,用于停止所有actions