
Frames(坐标系)
- global map frame
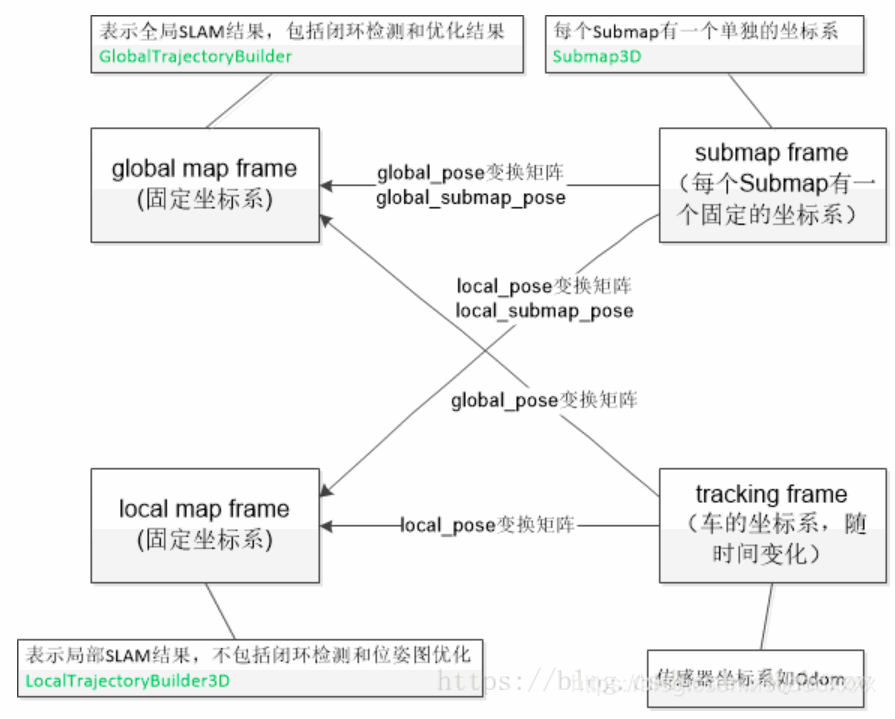
这是表示全局 SLAM 结果的坐标系。它是包含所有闭环和优化结果的固定地图坐标系。 当新的优化结果出现时,该帧与其他帧之间的转换可以跳转。
- local map frame
局部SLAM结果的坐标系,不包括闭环优化,对于给定某个时间点,该帧与全局地图之间的变换可能会发生变化,但是该帧和其他帧的变换不会发生变化。
- submap frame
每个子图都有一个单独的坐标系
- tracking frame
传感器数据表示的坐标系,自定义,可能是imu, laser, base_footprint
- gravity-aligned frame
重力对准坐标系,只在2D中使用,与tracking坐标系有相同位置,但是坐标系方向不一致
Transforms (变换)
- local_pose (局部姿态)
将数据从 tracking坐标系 或者子图坐标系 转换到 local map frame 的变换
- global_pose (全局位姿)
将数据从tracking坐标系或者子图坐标系 转换到global map frame的变换
前端的MatchingResult包含:1
2
3
4time 此次matching的scan时间。
local_pose 此次matching的scan的位姿。
range_data_in_local 未过滤的距离数据。
insertion_result range_data_in_local插入submap返回的结果。local map frame 和 submap的坐标系不是一回事。
子图的坐标系原点来自 range_data_in_local.origin, 也就是ActiveSubmaps2D::InsertRangeData中的AddSubmap(range_data.origin.head<2>());。
InsertionResult中的constant_data是此次range插入submap包含的主要内容,类型为TrajectoryNode::Data的共享指针。 constant_data其中有个成员const transform::Rigid3d local_pose,表示submap(node)在local map frame中的位姿,用于这两个坐标系之间的变换, 对每个子图,local_pose在不断更新 第1个local_pose是子图坐标系的原点,也就是上面的 range_data_in_local.origin,也是MotionFilter的判断依据,判断位姿和上一次插入scan的位姿有一定差别
MatchingResult里也有一个local_pose, 和 constant_data 的那个local_pose是相同的,赋值用的都是下一帧位姿的观测值。不过在后端里用的是InsertionResult的local_pose,源码在PoseGraph2D::AddNode。这个是在AddSubmap函数中创建新的submap的时候加入的,是创建submap时的第一个ranges的原点。
constant_data还有一个成员global_pose,这是submap(node)在global map frame的位姿。