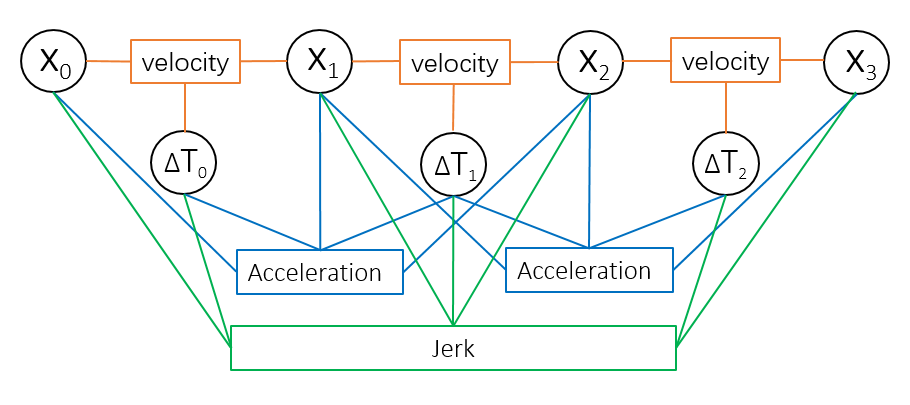
加速度的变化率过大会使机器人底盘电机输出的力矩突变而引起机器人受冲击振荡,为了使TEB生成的轨迹 less jerky, 考虑jerk约束。jerky的意思是有突然的停止和行走现象,也就是trajectory不够平滑稳定。 github上的TEB jerk约束的代码,我估计作者自己都没认真测试,有很多低级错误,比如变量omega写成了omege,都改完之后,如果yaml里用了Jerk约束,运行时规划出了路径,但是没有速度。还需要自己调试