
消息类型
sensor_msgs/PointCloud2类型如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20# N维的点云,点的数据以二进制blob形式保存,其layout用fields数组描述
# The point cloud data may be organized 2d (image-like) or 1d
# (unordered). Point clouds organized as 2d images may be produced by
# camera depth sensors such as stereo or time-of-flight.
Header header
点云的2D结构,如果点云无序,height是1,width就是点云的length
uint32 height
uint32 width
# 用二进制数据blob的形式,描述channels 及其layout
PointField[] fields
bool is_bigendian
uint32 point_step # Length of a point in bytes
uint32 row_step # Length of a row in bytes
uint8[] data # 点的数据,size = row_step * height
bool is_dense # True if there are no invalid points
PointCloud2的data是序列化后的数据,直接看不到物理意义。只能转为点云1类型
sensor_msgs/PointCloud类型如下:1
2
3
4
5
6
7
8
9Header header
# 在header坐标系中的3D点云
geometry_msgs/Point32[] points
# Each channel should have the same number of elements as points array,
# and the data in each channel should correspond 1:1 with each point.
# Channel names in common practice are listed in ChannelFloat32.msg.
ChannelFloat32[] channels
坐标系和点云的位置关系如下,我们感兴趣的是z,也就是相机坐标系到点云的距离
从sensor_msgs::PointCloud2类型转为sensor_msgs::PointCloud,而且获知坐标1
2
3
4
5
6
7
8
9
10
11
12
sensor_msgs::PointCloud2 in_pcl;
sensor_msgs::PointCloud out_pcl;
sensor_msgs::convertPointCloud2ToPointCloud(in_pcl, out_pcl);
for (int i=0; i < out_pcl.points.size(); i++)
{
ROS_INFO("out_pcl x: %f, y: %f, z: %f",
out_pcl.points[i].x, out_pcl.points[i].y, out_pcl.points[i].z);
}
消息的发布
意外发现ROS可以直接发布pcl的类型,不必转为ROS的消息类型1
2typedef pcl::PointCloud<PointT> PointCloudT;
PCL2_publisher_ = nh.advertise<PointCloudT>("pointcloud2", 1, this);
ros在pcl_ros中做了Publisher的多态。使得ros的标准Publisher可以接收pcl::PointCloud<T>类型的消息,并自动转换成sensor_msgs::PointCloud2的消息类型,再发布出去。
几种点云类型的转换
点云格式主要有四种,sensor_msgs::PointCloud,也就是点云1已经弃用,主要用点云2,但是点云1有时还有用。比如点云2转为点云1消息,可看到包含多少个点,rostopic echo --noarr pcl1/points,结果可以是<array type: geometry_msgs/Point32, length: 256000>,可看到每个点的坐标值。
sensor_msgs::PointCloud
sensor_msgs::PointCloud2
pcl::PCLPointCloud2 — PCL data structure mostly for compatibility with ROS (I think)
pcl::PointCloud
— standard PCL data structure
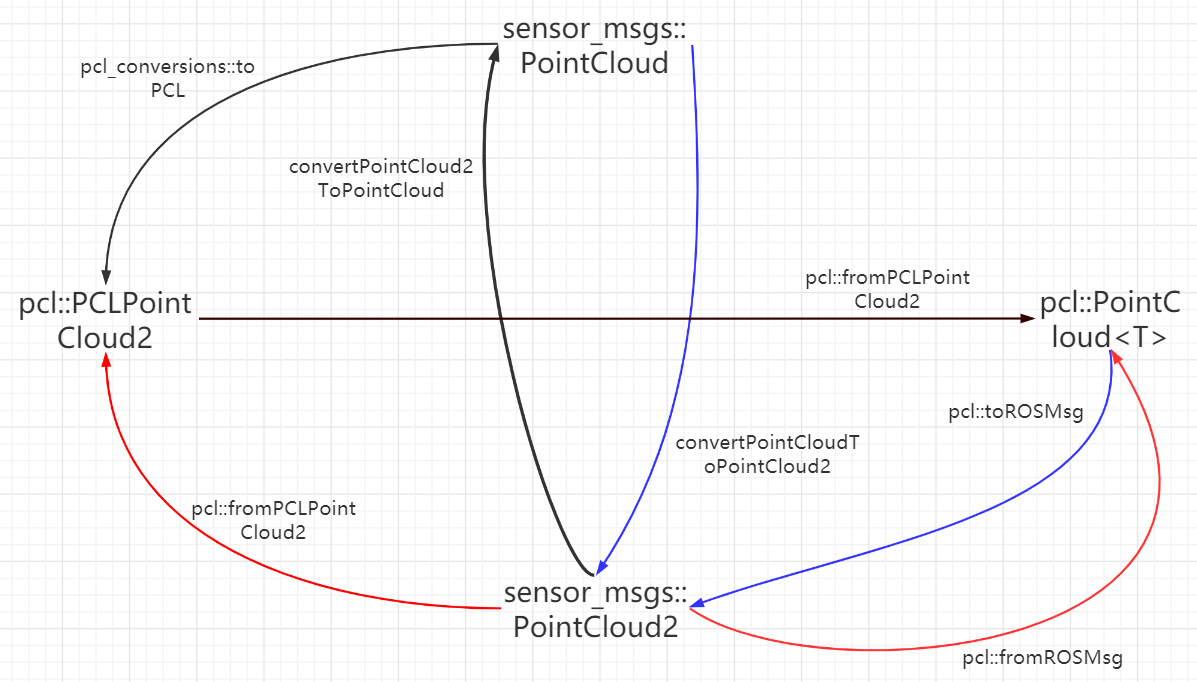
find_package里添加sensor_msgs, pcl_ros, pcl_conversions
ROS PointCloud2 和 PointCloud的转换
1 | sensor_msgs::PointCloud out_pcl; |
反过来就用sensor_msgs::convertPointCloudToPointCloud2
可以使用point_cloud_converter在点云1和点云2 之间转换1
2PointCloudConverter initialized to transform from PointCloud (/points_in) to PointCloud2 (/points2_out).
PointCloudConverter initialized to transform from PointCloud2 (/camera_/depth/points) to PointCloud (/pcl)
比如 rosrun point_cloud_converter point_cloud_converter_node points2_in:=/camera/depth/points points_out:=/pcl1
PointCloud2 转 pcl::PCLPointCloud2
1 | sensor_msgs::PointCloud2 cloud; |
pcl::PCLPointCloud2 转 pcl::PointCloud < pcl::PointXYZ >
1 | pcl::PCLPointCloud2 pcl_pc2; |
pcl::PointCloud < pcl::PointXYZ > 转 sensor_msgs::PointCloud2
1 |
|
反过来就是fromROSMsg(const sensor_msgs::PointCloud2 &, pcl::PointCloud<T>&)
#include <sensor_msgs/point_cloud2_iterator.h>
参考: pcl_conversions