
costmap中,机器人需要避开区域包括3类:
静态地图中的障碍物,适合描述整个静态场景的静止障碍物信息,如墙面、固定不动的桌柜等,对应
StaticLayer,一旦在costmap中加入static_map,即使地图中的障碍物后来移走了,该区域在costmap中依然存在,机器人仍然会避开该区域。传感器观察到的障碍物,适合描述运动的障碍物,如行人、小车、移动位置的桌椅等。通过传感器激光实时扫描到的障碍物
ObstacleLayer。这一块障碍物信息是不断变化的,对于运动小车的实时避障是很有帮助的。自定义障碍物,禁止行驶区域

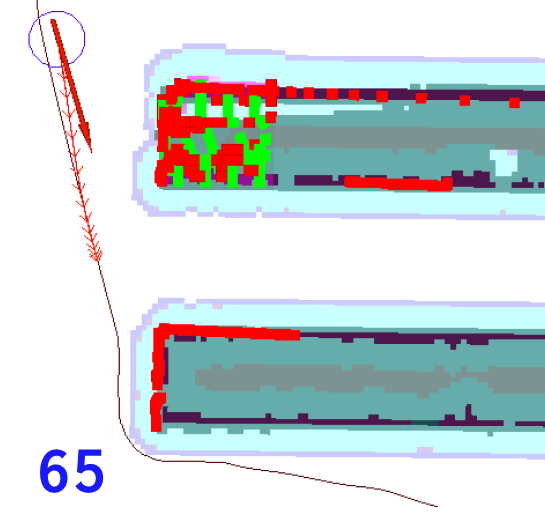
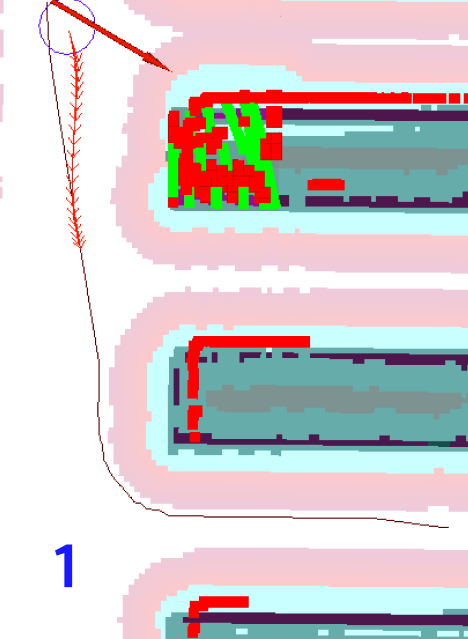
二维costmap地图示例如图上所示。红色单元表示代价地图中的障碍物,蓝色单元表示由机器人内切半径来计算膨胀的障碍物,红色多边形表示机器人的垂直投影(footprint),浅灰色代表已知且未被占用的区域,深灰色代表未知区域。为了避免机器人与障碍碰撞,footprint不能与红色相交,机器人的中心不能穿过蓝色
定义了5个具体的值衡量机器人的状态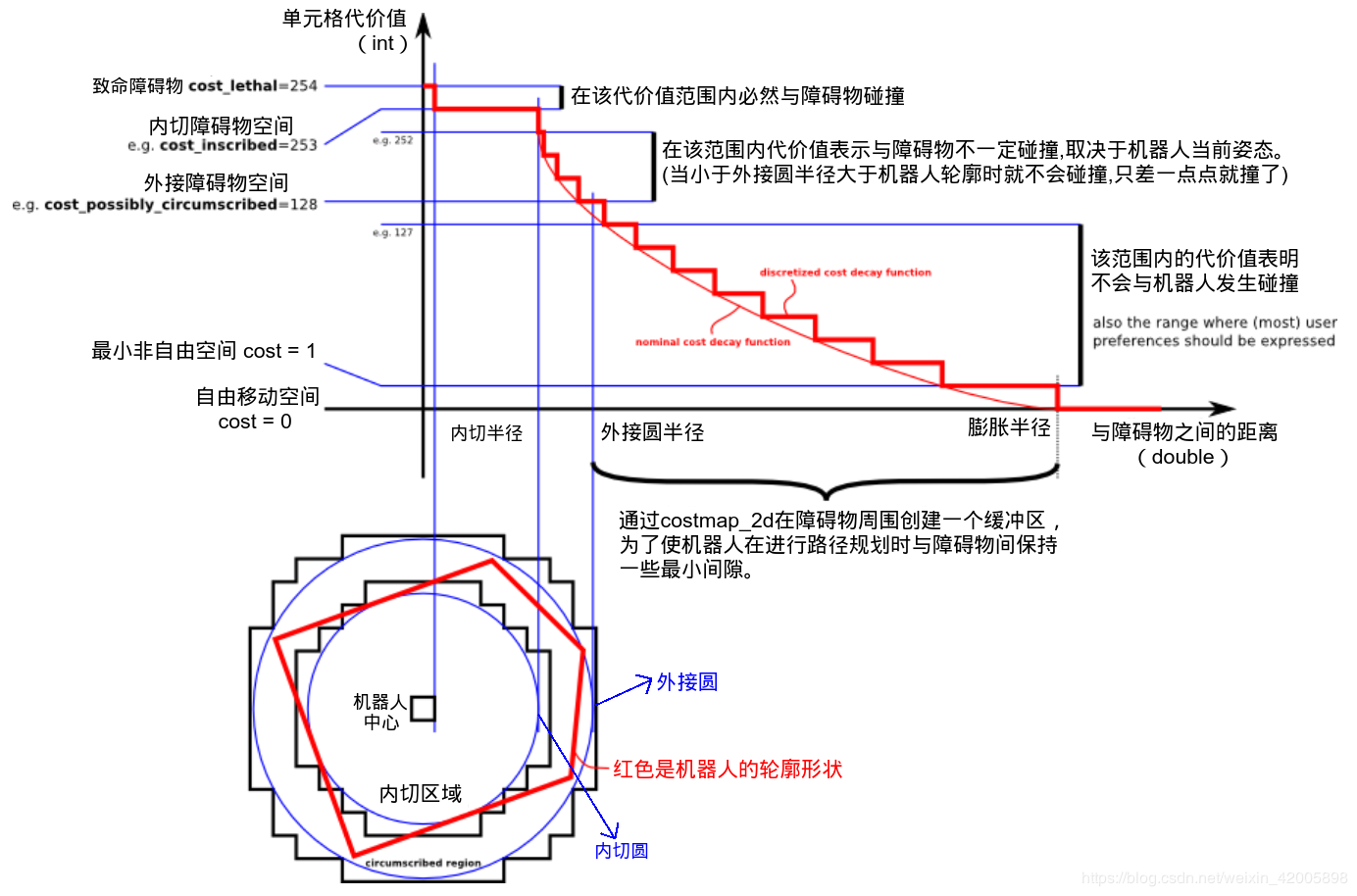
上图共分为五个部分:(下面的红色框图是机器人的轮廓,旁边的黑框是上图的映射位置)
- Lethal(致命的):机器人的中心与该网格的中心重合,此时机器人必然与障碍物冲突。枚举值254
- Inscribed(内切):网格的外切圆与机器人的轮廓内切,此时机器人也必然与障碍物冲突。 枚举值253
- Possibly circumscribed(外切):网格的外切圆与机器人的轮廓外切,此时机器人相当于靠在障碍物附近,所以不一定冲突。
- Freespace(自由空间):没有障碍物的空间。枚举值0
- Unknown(未知):未知的空间。 枚举值255
代价地图采用网格的形式,分为三种状态:占用(有障碍物)、无用(空闲的)、未知。每个网格的值如下:1
2
3
4NO_INFORMATION = 255;
LETHAL_OBSTACLE = 254;
INSCRIBED_INFLATED_OBSTACLE = 253;
FREE_SPACE = 0;
注意252和127没有定义
cost_lethal代价值254,机器人中心在一个cell里,这肯定发生碰撞cost_inscribed代价值253,机器人中心所在的cell与障碍物的距离小于机器人的内切圆半径,还是肯定碰撞,cell的代价值大于等于inscribed costcost_possibly_circumscribed使用机器人的外接圆半径作为 cutoff distance. 机器人中心所在cell到障碍物距离小于机器人外切圆半径,但是大于内切圆半径。 如果机器人中心所在的cell大于等于这个值,是否碰撞要取决于机器人的朝向
possibly这个词表示不一定真是一个obstacle cell,而是用户自定义一个代价值的情况。比如,如果用户想让机器人应对避开一段特定的区域,应当向那段区域的代价地图插入自定义的代价值,而不考虑任何障碍物。
尽管128也在上图中,但真实的代价值受内切圆半径和外接圆半径的影响,对于源码在InflationLayer::computeCost:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19/** @brief Given a distance, compute a cost.
* @param distance The distance from an obstacle in cells
* @return A cost value for the distance */
inline unsigned char computeCost(double distance) const
{
unsigned char cost = 0;
if (distance == 0)
cost = LETHAL_OBSTACLE;
else if (distance * resolution_ <= inscribed_radius_)
cost = INSCRIBED_INFLATED_OBSTACLE;
else
{
// make sure cost falls off by Euclidean distance
double euclidean_distance = distance * resolution_;
double factor = exp(-1.0 * weight_ * (euclidean_distance - inscribed_radius_));
cost = (unsigned char)((INSCRIBED_INFLATED_OBSTACLE - 1) * factor);
}
return cost;
}
障碍层 膨胀层
Obstacle Map Layer:障碍层,用于动态的记录传感器感知到的障碍物信息。
Inflation Layer:膨胀层,在以上两层地图上进行膨胀(向外扩张),以避免机器人的撞上障碍物。膨胀是一个从占用cell代价值从内切障碍过渡到FREE的过程,距离cell越远代价越小,膨胀层会把障碍物代价膨胀直到该半径为止。
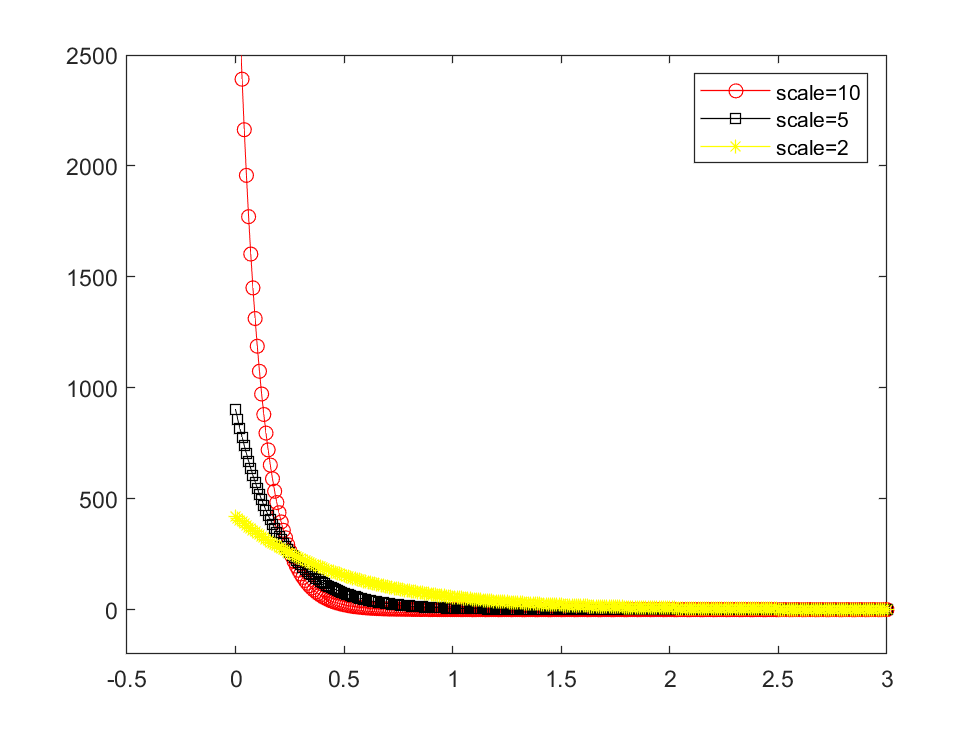
到实际障碍物距离dist,. 在内切圆半径到膨胀半径之间的所有cell,可以使用如下公式来计算膨胀代价:
如果cost_scaling_factor默认10,膨胀半径默认0.55,那么cost最小约为1
- cost_scaling_factor: 膨胀过程中应用到代价值的比例因子,默认10。从上面公式可以看出,增大比例因子会降低代价。10对应的代价值降低速度很快
- inflation_radius:膨胀半径,默认0.55. 膨胀层会把障碍物代价膨胀直到该半径为止,一般将该值设置为机器人底盘的直径大小。如果太小,车就会贴着障碍走,或者说容易撞到障碍物就需要增大该值,若经常无法通过狭窄地方就减小该值。
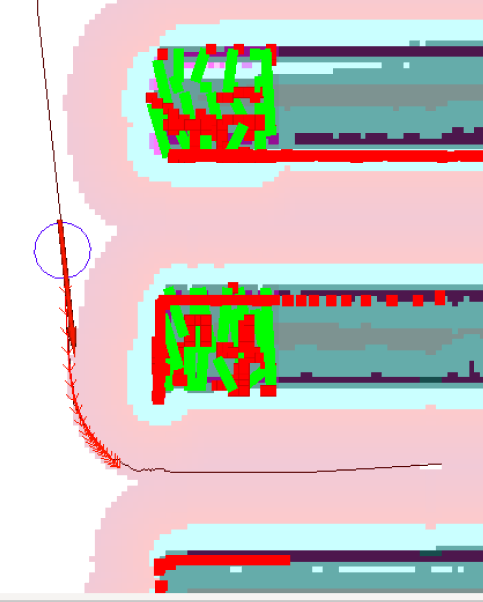
减小cost_scaling_factor,使代价值增大,rviz里的膨胀层变为粉色。如果这个参数很大很大,代价值趋近于0,也就是FREE。如果很小,代价值趋近于253,相当于放大了内切障碍值。cost_scaling_factor越小,膨胀层越趋近粉色,反之趋近蓝色。
查看话题/move_base/local_costmap/costmap_updates,会发现一些数值变大
全局代价地图一般膨胀较多,使机器人转弯顺利。 但是局部代价可以不用膨胀层,这是因为TEB已有障碍物膨胀功能。 增大cost_scaling_factor和减小膨胀半径可以使机器人容易进窄通道,但一般是调整TEB,这两个参数不修改。
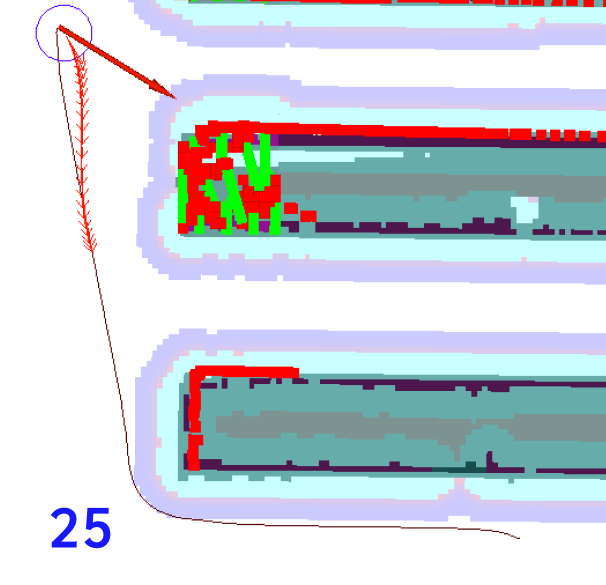
添加了静态层、障碍层、膨胀层的代价地图是这样的:
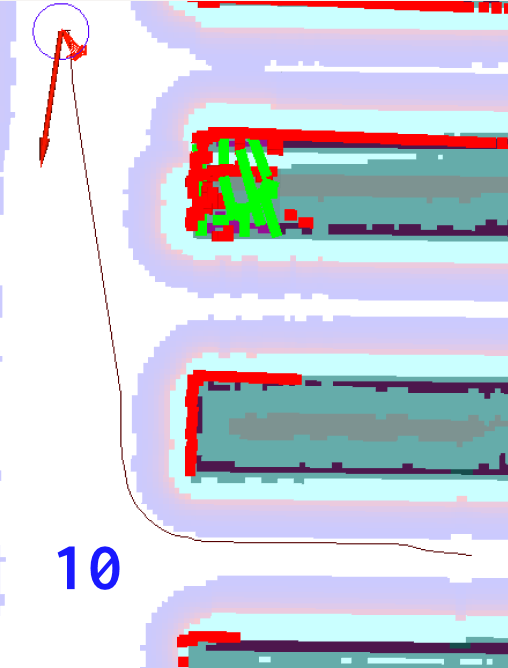
如果代价地图不添加膨胀层,结果是这样:
但是加不加障碍层,看上去没有变化, 目前无法在rviz里直接可视化每一层,只能添加或去除后观察