如果点云分布非常规整,是某个特定物体的点云模型,则应该使用Octree,因为很容易求解凸包并且点与点之间相对距离无需再次比对父节点和子节点,更加明晰,典型的例子是斯坦福的兔子。
lego_loam建立的点云太稀疏,只能用于定位而不能导航。
用RGBD建立3D稠密点云图,并使用octomap进行压缩滤除地面信息。然后通过2D投影生成占据栅格地图最后利用costmap进行全局和局部路径规划导航实时避障,这又变成2D导航了
点云地图也有一些基于ICP或直接用八叉树地图的三维导航的方法,可以用于无人机在三维空间的导航。至于稀疏特征点地图,容易受光照和场景影响
点云地图: 无序,因为它的点都是无序的,无法坐标索引查询
八叉树地图特点
- 稀疏: 不需要对空间进行稠密切分
- 结构化: 方块排列固定,切分为八份
- 非直接索引查询
八叉树地图基于OctoTree,可以是多分辨率的地图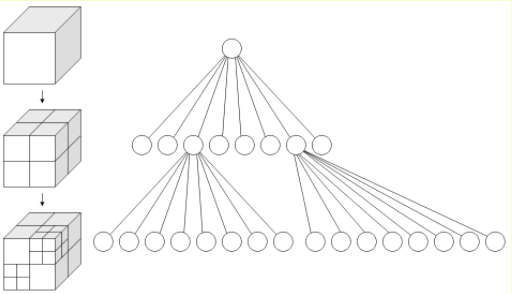
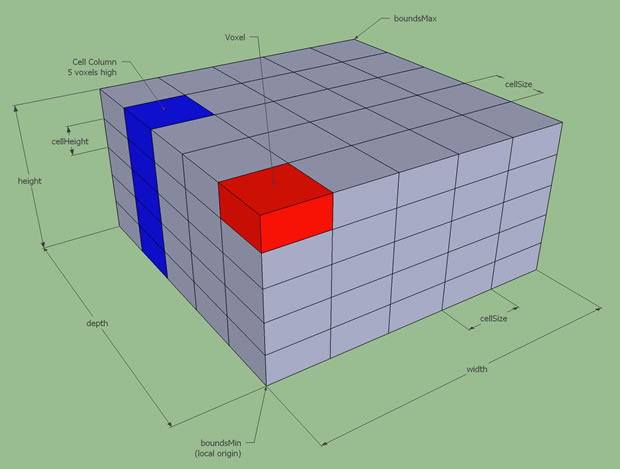
Voxel Grid就像3D的占用地图,分辨率是固定的