
realsense d435i包含两个红外相机、红外发射器、RGB相机和IMU四个模块,显然四个传感器的空间位置是不同的,我们在处理图像和IMU数据时需要将这些数据都放在统一的坐标系上去。比如我们用d435i运行vins,处理的图像和IMU数据都需要放在同一个坐标系下,因此需要标定IMU相对RGB相机的空间位置(包括旋转和位移)。
另外,相机固有参数比如焦距、畸变参数等以及IMU的零偏和scale系数等都需要提前知道。前者称为外参,后者称为内参,在运行程序前我们需要标定它们,不论程序是否有自标定功能,毕竟好的初始标定值对于自标定来说也是有利的。
标定顺序:IMU标定 —> 相机标定 —> IMU+相机联合标定. 这么设定顺序是因为最后一步的IMU和相机的联合标定需要 IMU和相机的内参
Allan方差
在IMU采集数据时,会产生两种误差:确定性误差和随机性误差,为获得精确的数据,需要对上述两种误差进行标定,加速度计和陀螺仪随机误差的标定通常使用Allan方差法,它是20世纪60年代由美国国家标准局的David Allan提出的基于时域的分析方法。
A ROS package tool to analyze the IMU performance. C++ version of Allan Variance Tool. The figures are drawn by Matlab, in scripts.
Actually, just analyze the Allan Variance for the IMU data. Collect the data while the IMU is Stationary, with a two hours duration.
code_utils标定IMU的噪音密度和随机游走系数。
安装库和依赖项
安装依赖项,不装之后的编译会报错: sudo apt-get -y install libdw-dev,结果可能提示1
2
3
4The following packages have unmet dependencies:
libdw-dev : Depends: libelf-dev but it is not going to be installed
Depends: libdw1 (= 0.165-3ubuntu1) but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
这是因为一个依赖项已经安装了不同版本:Depends: libelf1 (= 0.165-3ubuntu1) but 0.165-3ubuntu1.2 is to be installed。 解决方法: sudo aptitude install libdw-dev,对给出的方案,选择第二个,降级 libelf1[0.165-3ubuntu1.1 (now) -> 0.158-0ubuntu]
编译code_utils和imu_utils
全局安装ceres库,因为code_imu依赖ceres。不要同时把imu_utils和code_utils一起放到src下进行编译。因为imu_utils 依赖 code_utils,原作者的CMakeLists写的不好,所以先编译code_utils再编译后者。
在code_utils下面找到sumpixel_test.cpp,修改#include "backward.hpp"为#include"code_utils/backward.hpp",再依次编译两个包
发布D435i的IMU数据
可以直接在rs_camera.launch基础上针对IMU校准做修改。目的是将acc、gyro数据对齐使用同一个topic发布。1
2
3
4<!-- 更改前原版本arg name="unite_imu_method" default=""/-->
<arg name="unite_imu_method" default="linear_interpolation"/>
<!--或着将参数改为copy-->
<arg name="unite_imu_method" default="copy"/>
启动: roslaunch realsense2_camera rs_imu_calibration.launch,然后录制imu数据包rosbag record -O imu_calibration /camera/imu,让IMU静止不动两个小时,录制IMU的bag.
标定
根据imu_utils文件夹里面的A3.launch改写D435i标定启动文件:d435i_imu_calib.launch注意,记得修改max_time_min对应的参数,默认是120,也就是两个小时,如果ros包里的imu数据长度没有两个小时,等bag播放完了,还是停留在wait for imu data这里,不会生成标定文件。我录了1小时59分多一点,所以还得改成119
d435i_imu_calibration.launch如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<!--TOPIC名称和上面一致-->
<param name="imu_topic" type="string" value= "/camera/imu"/>
<!--imu_name 无所谓-->
<param name="imu_name" type="string" value= "D435i"/>
<!--标定结果存放路径-->
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<!--数据录制时间-min-->
<param name="max_time_min" type="int" value= "120"/>
<!--采样频率,即是IMU频率,采样频率可以使用rostopic hz /camera/imu查看,设置为200,也就是rosbag play播放频率-->
<param name="max_cluster" type="int" value= "200"/>
</node>
</launch>
先启动标定程序: roslaunch imu_utils d435i_imu_calib.launch,再播放bag: rosbag play -r 200 imu_calibration.bag
标定结果
标定结果是D435i_imu_param.yaml:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32%YAML:1.0
---
type: IMU
name: D435i
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 3.6673681012835031e-03
gyr_w: 7.0017785520472972e-05
x-axis:
gyr_n: 3.6001489799186333e-03
gyr_w: 6.2846247607788020e-05
y-axis:
gyr_n: 4.7157261366663813e-03
gyr_w: 7.5207268006344615e-05
z-axis:
gyr_n: 2.6862291872654953e-03
gyr_w: 7.1999840947286307e-05
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.7436489578044256e-02
acc_w: 1.0915021608117670e-03
x-axis:
acc_n: 1.8271976632141730e-02
acc_w: 5.5394830052109354e-04
y-axis:
acc_n: 2.8924134998445018e-02
acc_w: 1.5674764920646303e-03
z-axis:
acc_n: 3.5113357103546017e-02
acc_w: 1.1530816898495772e-03
我们一会只用到Gyr中的avg-axis的gyr_n和gyr_w, Acc中的avg-axis的acc_n和acc_w
终端输出结果:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94gyr x numData 781205
gyr x start_t 1.59343e+09
gyr x end_t 1.59344e+09
gyr x dt
-------------7140.59 s
-------------119.01 min
-------------1.9835 h
gyr x freq 109.403
gyr x period 0.00914049
gyr y numData 781205
gyr y start_t 1.59343e+09
gyr y end_t 1.59344e+09
gyr y dt
-------------7140.59 s
-------------119.01 min
-------------1.9835 h
gyr y freq 109.403
gyr y period 0.00914049
gyr z numData 781205
gyr z start_t 1.59343e+09
gyr z end_t 1.59344e+09
gyr z dt
-------------7140.59 s
-------------119.01 min
-------------1.9835 h
gyr z freq 109.403
gyr z period 0.00914049
Gyro X
C -6.83161 94.2973 -19.0588 2.983 -0.0404918
Bias Instability 2.37767e-05 rad/s
Bias Instability 6.28462e-05 rad/s, at 63.1334 s
White Noise 12.9453 rad/s
White Noise 0.00360015 rad/s
bias -0.363298 degree/s
-------------------
Gyro y
C -8.74367 117.584 -15.9277 2.47408 -0.0373467
Bias Instability 6.41864e-05 rad/s
Bias Instability 7.52073e-05 rad/s, at 104.256 s
White Noise 16.8998 rad/s
White Noise 0.00471573 rad/s
bias -0.544767 degree/s
-------------------
Gyro z
C -4.51808 68.1919 -9.33284 1.95333 -0.0262641
Bias Instability 8.50869e-05 rad/s
Bias Instability 7.19998e-05 rad/s, at 63.1334 s
White Noise 9.43212 rad/s
White Noise 0.00268623 rad/s
bias -0.0762471 degree/s
-------------------
==============================================
==============================================
acc x numData 781205
acc x start_t 1.59343e+09
acc x end_t 1.59344e+09
acc x dt
-------------7140.59 s
-------------119.01 min
-------------1.9835 h
acc x freq 109.403
acc x period 0.00914049
acc y numData 781205
acc y start_t 1.59343e+09
acc y end_t 1.59344e+09
acc y dt
-------------7140.59 s
-------------119.01 min
-------------1.9835 h
acc y freq 109.403
acc y period 0.00914049
acc z numData 781205
acc z start_t 1.59343e+09
acc z end_t 1.59344e+09
acc z dt
-------------7140.59 s
-------------119.01 min
-------------1.9835 h
acc z freq 109.403
acc z period 0.00914049
acc X
C 3.36177e-05 0.00175435 -0.000159698 7.23303e-05 -7.16006e-07
Bias Instability 0.000553948 m/s^2
White Noise 0.018272 m/s^2
-------------------
acc y
C 9.36955e-05 0.00234733 0.00012197 0.000243676 -2.66252e-06
Bias Instability 0.00156748 m/s^2
White Noise 0.0289241 m/s^2
-------------------
acc z
C 5.07832e-05 0.00331104 -0.000381222 0.000199602 -2.43776e-06
Bias Instability 0.00115308 m/s^2
White Noise 0.0351134 m/s^2
经过这些标定会生成一个yaml文件和很多txt文件,主要是yaml文件,给出了加速度计和陀螺仪三轴的noise_density和random_walk,同时计算出了平均值,后面IMU+摄像头联合标定的时候需要这些均值。
标定外参的准备
将Acc和Gyr的第一组平均数据拷贝到kalibr对应的imu.yaml文件中1
2
3
4
5
6
7rostopic: /camera/imu
update_rate: 200.0 #Hz
accelerometer_noise_density: 2.89e-01 #continous
accelerometer_random_walk: 4.55e-04
gyroscope_noise_density: 3.02e-03 #continous
gyroscope_random_walk: 2.29e-05
分别是加速度计和陀螺仪的高斯白噪声和随机游走的平均值,是IMU噪声模型中的两种噪声。
查看默认imu与相机参数
D435i相关的imu_info话题如下:
realsense_camera/IMUInfo with the header.frame_id set to either imu_accel or imu_gyro to distinguish between accel and gyro info. 消息成员如下:1
2
3
4string frame_id
float64[12] data
float64[3] noise_variances
float64[3] bias_variances
rostopic echo -n1 /camera/color/camera_info得到结果:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16 frame_id: "camera_color_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [611.3538208007812, 0.0, 327.437744140625, 0.0, 610.015869140625, 239.99667358398438, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [611.3538208007812, 0.0, 327.437744140625, 0.0, 0.0, 610.015869140625, 239.99667358398438, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
对于/camera/depth/imu_info,结果是:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16frame_id: "camera_depth_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [380.23321533203125, 0.0, 316.4999084472656, 0.0, 380.23321533203125, 237.40985107421875, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [380.23321533203125, 0.0, 316.4999084472656, 0.0, 0.0, 380.23321533203125, 237.40985107421875, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
话题/camera/infra2/camera_info和/camera/infra2/camera_info的结果完全一样:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16frame_id: "camera_infra1_optical_frame"
height: 480
width: 640
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [380.23321533203125, 0.0, 316.4999084472656, 0.0, 380.23321533203125, 237.40985107421875, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [380.23321533203125, 0.0, 316.4999084472656, 0.0, 0.0, 380.23321533203125, 237.40985107421875, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
可以看出,实际上出厂没有标定IMU
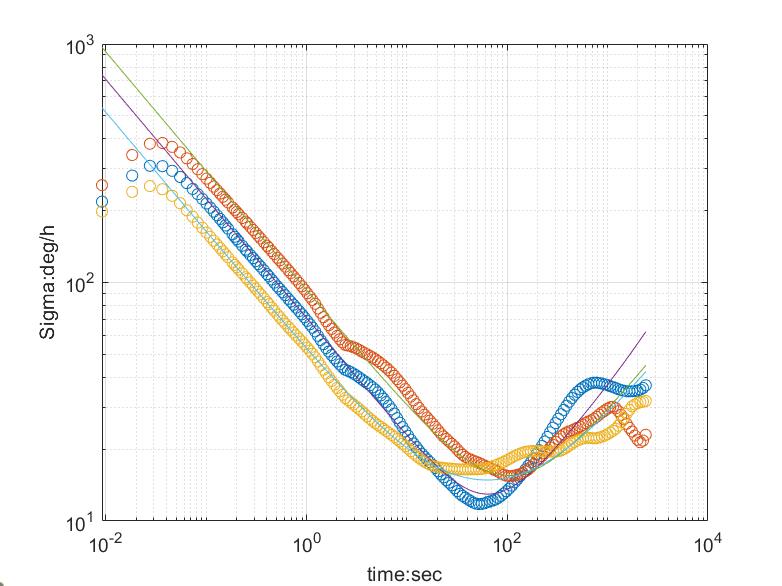
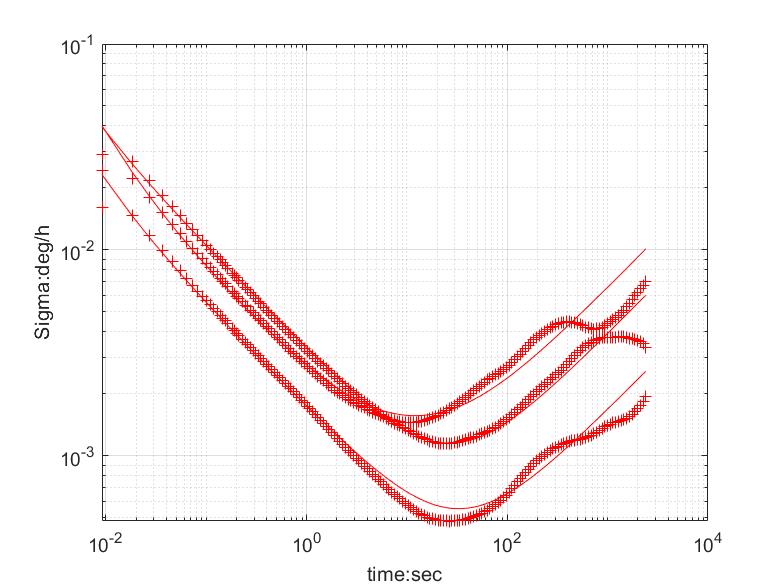
绘制Allan曲线
imu_utils/scripts中是Matlab写的.m文件,按照draw_allan.m创建文件draw_allan_acc.m和draw_allan_gyr.m
由于Ubuntu下安装Matlab比较麻烦,因此将数据和.m文件都拷贝到Windows系统下绘制,注意文件路径和m文件中要对应,尤其matlab中的当前路径指的是左侧栏的路径,而不是m文件所在的路径
参考:
RealSense D435i Calibration
官方Github
VIO标定IMU随机误差——Allan方差法