
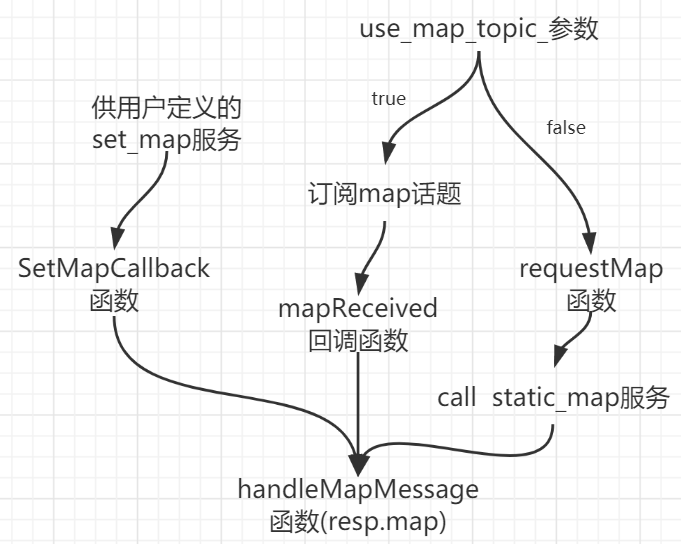
实际用的是requstMap这一支
准备工作
参数是const nav_msgs::OccupancyGrid& msg1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18boost::recursive_mutex::scoped_lock cfl(configuration_mutex_);
// 地图的宽高,分辨率
ROS_INFO("Received a %d X %d map @ %.3f m/pix\n",
msg.info.width,
msg.info.height,
msg.info.resolution);
// 如果目前的全局坐标系不是map
if(msg.header.frame_id != global_frame_id_)
ROS_WARN("Frame_id of map received:'%s' doesn't match global_frame_id:'%s'. This could cause issues with reading published topics",
msg.header.frame_id.c_str(),
global_frame_id_.c_str() );
//free相应的指针
freeMapDependentMemory();
// Clear queued laser objects because they hold pointers to the existing map
lasers_.clear();
lasers_update_.clear();
frame_to_laser_.clear();
处理获得的地图
1 | // AMCL所用的地图类型 |
转换为AMCL的地图信息1
2
3
4
5
6
7
8
9//转换成AMCL的标准地图,0->-1(不是障碍);100->+1(障碍);else->0(不明)
map_ = convertMap(msg); // 类型map_t
//将不是障碍的点的坐标保存下来, 构成地图栅格的空闲区域
free_space_indices.resize(0);
for(int i = 0; i < map_->size_x; i++)
for(int j = 0; j < map_->size_y; j++)
if(map_->cells[MAP_INDEX(map_,i,j)].occ_state == -1)
free_space_indices.push_back(std::make_pair(i,j));
从参数服务器获取初始位姿及方差放到pf中
1 | updatePoseFromServer(); |
其实就是rosparam把6个参数放到init_pose_和init_cov_两个数组中,供下面进一步赋值
创建粒子滤波器并初始化
1 | pf_ = pf_alloc(min_particles_, max_particles_, |
pf_alloc和pf_init是两个重要函数。 pf_alloc只在这里调用了一次,pf_init在这里和applyInitialPose里调用
定义里程计与激光雷达并初始化数据
1 | delete odom_; |
SetModelLikelihoodField函数就是使用前三个形参用于赋值, 然后调用 map_update_cspace(this->map, laser_likelihood_max_dist_);, 这个是似然域模型中最复杂的函数
它的专门分析在这里
参数laser_likelihood_max_dist默认为2,是地图上做障碍物膨胀的最大距离,用于似然域模型
这几个参数没有用在似然域模型: laser_z_short, laser_z_max, laser_lambda_short, laser_likelihood_max_dist
applyInitialPose()
// In case the initial pose message arrived before the first map,
// try to apply the initial pose now that the map has arrived.
可能初始位姿的信息比第一个map先到达,map到达后apply初始位姿1
2
3
4
5
6
7
8boost::recursive_mutex::scoped_lock cfl(configuration_mutex_);
if( initial_pose_hyp_ != NULL && map_ != NULL ) {
pf_init(pf_, initial_pose_hyp_->pf_pose_mean, initial_pose_hyp_->pf_pose_cov);
pf_init_ = false;
delete initial_pose_hyp_;
initial_pose_hyp_ = NULL;
}