
根据概率论知识,SLAM工作可以划分为定位和建图两部分,一般是通过观测值和里程计信息进行定位得到,然后根据位姿 以及观测信息进行建图得到m。
gmapping其实就是优化版的RBPF,先看RBPF的一般过程:
- 时间t的粒子群 是 从提议分布中采样获得的,提议分布往常是里程计运动模型
- 粒子权重 是目标分布和提议分布的比,用来描述提议分布和目标分布的差别,越接近1说明提议分布越好
- 重采样:只有部分粒子用于估计目标分布,重采样之后,所有粒子权重相同。 如果能直接从目标分布采样,所有粒子权重都相同,实际上只用1个粒子就行,或者说没有采样的概念了。因此,提议分布越差,粒子群的权重差别越大, (粒子归一化权重的平方和的倒数)就越大。
- 根据轨迹各个位姿 和各个观测 估计地图
目标分布: 真实分布,如果考虑机器人的运动,那么机器人在t时刻位置的真实分布就是目标分布,但是这是不能得到的,只是理论上的分布,我们需要只能通过其他分布来得到该分布
提议分布: 使用提议分布来得到目标分布的真实情况。一般的,使用里程计模型来作为提议分布。但是改进的提议分布发现激光具有单峰的特性,方差更小,更适合作为提议分布,因此考虑激光和里程计一起作为改进的提议分布
gmappping的优化
优化提议分布
不仅考虑机器人的运动,而且考虑了最近的观测,使得提议分布更接近目标分布,从而减少了所需的粒子数。之前的提议分布是 ,优化之后是
如果只用运动模型做提议分布,粒子权重计算比较简单: 。 但是里程计提供位姿的不确定度比激光大得多,导致置信区间太大,似然又太小,各个粒子的权重差别很大,实际上有意义的只有一小部分,结果就需要很多粒子。
相比之下,雷达观测的置信区间小,似然大,所需粒子就少了很多。所以可以把观测加入到提议分布优化之后,结果粒子权重公式为公式 13
因为观测似然函数的不确定形态,提议分布没有闭式解,所以方法是用采样对提议分布做估计。
减少重采样
RBPF中,粒子要覆盖里程计状态的全部空间,但只有一部分粒子是接近目标分布的,粒子权重的差别大,所以需要频繁重采样来丢弃权重小的粒子,保留权重大的粒子,同时又造成了另一个弊端:粒子退化。
选择性重采样,当 小于粒子数一半时,说明粒子分布和真实分布差距很大,某些粒子离真实值近,某些远,执行重采样。
GMapping依靠粒子的多样性, 回环时消除累积的误差。起始位置需要选择特征较为丰富的地方, 这样能在回环时提高正确粒子权重。
- 使用scan-matcher估计似然函数的置信区间
- 对置信区间采样,对采样点进行评价
- 对每个粒子计算,计算K个粒子的期望方差,计算时考虑了里程计运动信息,公式15和16
算法复杂度
主要影响因素是计算提议分布,更新地图,计算权重,检测是否需要重采样,重采样。 结合源码,最大的影响参数是particles, 其次是resampleThreshold, map_update_interval, throttle_scans, lskip
- 机器人经过未知区域时, 下降很慢
- 机器人经过已知区域时,每个粒子都在各自的地图中保持定位,权重都相差不大
- 当closing loop时, 会显著下降,有些粒子能保持定位,有些则丢失了定位,权重相差很大,此时执行重采样
缺陷
从论文和源码上看,gmapping算法有以下缺陷:
scan matcher 计算的是观测似然函数的置信区间,但函数可能是多峰的,比如closing loop的时候,这就造成了问题,粒子群的权重会有很大波动, 会显著下降,当低于
resample_Threshold时,就会执行重采样,然后恢复 最大值. 之所以大幅下降,就是因为观测似然出现多峰,使得提议分布与目标分布差别太大,导致粒子权重减小.因此不适用于多闭环的环境遇到长走廊或很空旷的环境,雷达数据没有什么特征,比如测距都是最大值,造成位姿在走廊方向的严重不确定,此时里程计精度就很重要了,有利于粒子群的收敛。如果里程计精度不好,增加粒子数也可以解决这个问题。
drawFromMotion函数是一个十分粗糙的运动模型,只是简单的矢量加减运算。相比于《概率机器人》中提到的速度模型和里程计模型,有很多方面都没有考虑,精度上可能有折扣。
随着场景增大所需的粒子也增加,内存和计算量都会增加,实际中建的地图不到几千平米时就会发生错误
重采样的粒子索引选取用的是轮盘赌算法,有些论文提出了一些更好的算法
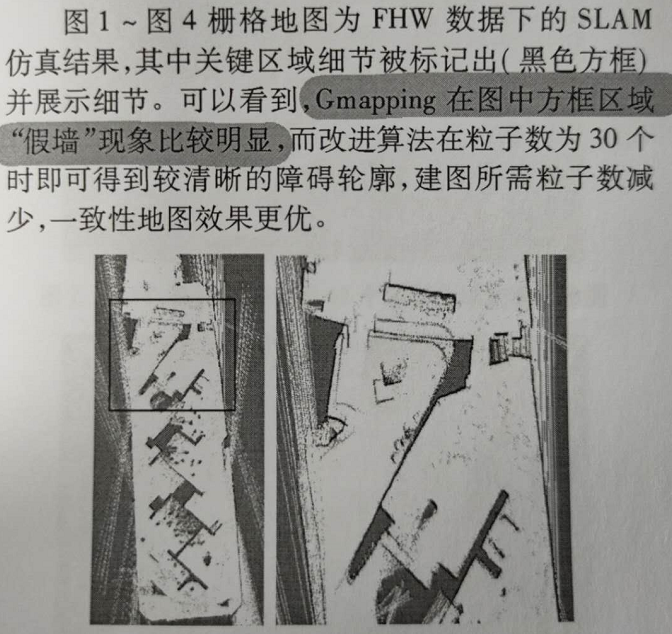
机器人的轨迹估计与真实的轨迹有一定差异,轨迹出现较大畸变的地方导致了"假墙".这是粒子多样性降低造成的,需要增加粒子数
源码中,用户设置的
miniScore参数过大时(超过170),scan match失败,转而使用里程计进行位姿估计.但这样就更不准了,而且gmapping算法里没有提示
综合来看,Gmapping适合的环境有以下特点: 小场景、closing loop比较少、没有长走廊或很空旷的环境、雷达精度高、机器人主机配置较高。此时相比Cartographer,Gmapping不需要太多的粒子并且没有回环检测,因此计算量小于Cartographer,精度没有差太多。