
栅格地图是将环境栅格化, 然后根据测量值对每个栅格的占有率进行计算, 通过概率计算判断给各栅格可能被障碍物占的几率, 并赋值一个0到1之间的值。通过激光雷达获取的大量数据帮助对每个栅格点进行准确判断。栅格地图中栅格大小决定了地图的精度, 也将影响机器人的定位精度,因此追求更小更多的栅格,但是栅格变小后,其数据量将会显著增加, 因此栅格地图不适合用于大型地图的构建, 适用于室内定位这种小型环境地图构建
地图在ROS中是以Topic的形式维护和呈现的,这个Topic名称就叫做/map,它的消息类型是nav_msgs/OccupancyGrid。由于/map中实际上存储的是一张图片,为了减少不必要的开销,这个Topic往往采用锁存(latched)的方式来发布。
锁存器的作用就是,将发布者最后一次发布的消息保存下来,然后把它自动发送给后来的订阅者。这种方式非常适合变动较慢、相对固定的数据(例如地图),然后只发布一次,相比于同样的消息不定的发布,锁存的方式既可以减少通信中对带宽的占用,也可以减少消息资源维护的开销。
nav_msgs/OccupancyGrid
map话题的消息类型是OccupancyGrid,通过rosmsg show nav_msgs/OccupancyGrid来查看1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21std_msgs/Header header #消息的报头
uint32 seq
time stamp
string frame_id #地图消息绑定在TF的哪个frame上,一般为map
nav_msgs/MapMetaData info #地图相关信息
time map_load_time #加载时间
float32 resolution #分辨率 单位:m/pixel
uint32 width #宽 单位:pixel
uint32 height #高 单位:pixel
geometry_msgs/Pose origin #原点
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
int8[] data #地图具体信息
info是地图的配置信息,它反映了地图的属性。设置地图原点1
2
3// 将栅格地图原点设置在整张图的(-20, -20)位置
grid_map.info.origin.x = -20;
grid_map.info.origin.y = -20;
整张地图的障碍物信息存放在data数据成员中,data是一个int8类型的vector,它存储的内容有width * height个int8型的数据,也就是这张地图上每个像素。map中data存储的格式如下1
2
3
40 空白区域
100 障碍物
-1 未知
1-99 根据像素的灰度值转换后的值,代表有障碍物的概率、
左下角像素点在世界坐标系下的位置为(origin_x,origin_y), 单位米。那么世界坐标系下的点(x,y),转换到地图坐标系,那么该点对应的data中的索引index为:1
index = (int)( (x - origin_x) / resolution) + ((int)((y - origin_y) / resolution)) * width;
该点在地图中的信息即为data[index]
一个宽和高的栅格地图,索引保存方式是这样的:1
2
3
4
5
6
74 8 12 16
3 7 11 15
2 6 10 14
1 5 9 13
1相当于地图的原点,6就对应坐标(1, 1)。那么点坐标(2, 3),对应的栅格索引是x * map.info.width + y = 12
pgm和yaml
运行rosrun map_server map_saver -f fileName可以保存地图,保存成功后,会有文件名对应的pgm和yaml文件。pgm文件就是地图的文件,标准的地图是用inkscape打开时看到的模样。
地图就是一张普通的灰度图像,通常为pgm格式。在地图中,黑色的网格是障碍区域,白色的网格是无障碍区域,灰色的网格是未知区域。map_server从图片中读取信息然后将每个网格都赋值[-1, 100],灰色是-1,代表未知区域;白色是0,空闲区域;黑色是100,障碍区域。
yaml描述地图元数据,内容如下:1
2
3
4
5
6
7
8
9image: Software_Museum.pgm #指定地图文件,可以是相对路径
resolution: 0.020000 #地图的分辨率 单位为 m/pixel
# 地图的原点,即地图左下像素的2D姿态(x,y,yaw),偏航为逆时针旋转,忽略偏航时为0
# 这个坐标体系用于让ros在图片里找到原点而已
origin: [-15.720000, -12.520000, 0.000000]
negate: 0 # 0代表白色空闲,黑色占据。一般不用修改
occupied_thresh: 0.65 # 当占据的概率大于0.65认为被占据
free_thresh: 0.196 # 当占据的概率小于0.196认为无障碍
# 介于 occupied_thresh 和 free_thresh 的栅格unknown
其中占据的概率occ = (255-color_avg) / 255.0, color_avg为RGB三个通道的平均值。
- occupied_thresh:大于这个阀值的占用率的像素被认为occupied
- free_thresh:小于这个阀值的占用率的像素被认为是free
如果occupied_thresh设置的比较大,有些障碍物会没有障碍层和膨胀层。
如果建图时,障碍的边缘不够明显,也可能出现此问题,此时可以降低occupied_thresh。 其实还可以降低参数cost_scaling_factor,不过对膨胀层的影响较大。
- 栅格地图的分辨率不必太好,常用0.05
实际举例,先获得机器人的当前姿态: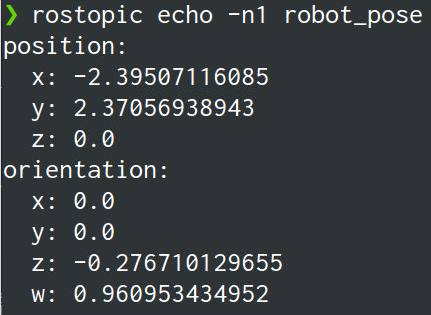
然后在rviz上测量出机器人与左下角两个方向的距离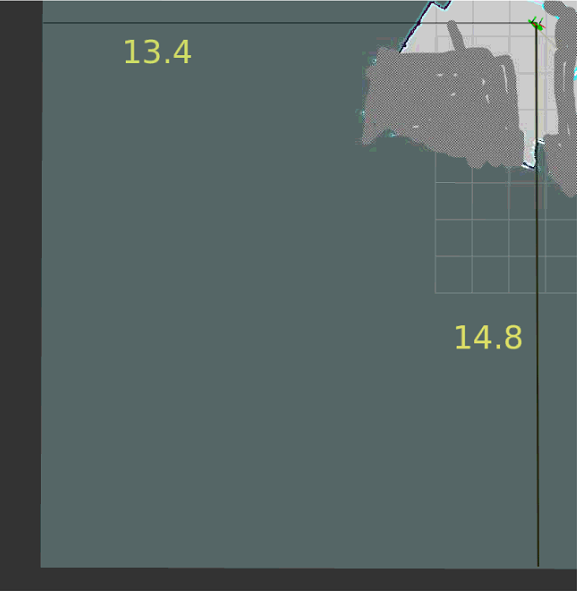
用机器人的坐标减去origin的坐标:
- x = -2.394 - (-15.72) = 13.326
- y = 2.37 - (-12.52) = 14.89
显然和测量结果大致相同,计算都是在map坐标系下。
map_server和map_saver
map_server是一个和地图相关的功能包,它可以将已知地图发布出来,供导航和其他功能使用,也可以保存SLAM建立的地图。它还提供了map_saver命令行实用程序,它允许动态生成的映射保存到文件。
要让map_server发布/map,需要yaml和pgm两个文件,然后可以通过指令来加载这张地图,map_server相关命令如下:1
2rosrun map_server map_server test.yaml 加载自定义的地图,通常使用roslaunch
rosrun map_server map_saver -f mymap 保存当前地图为mymap.pgm和mymap.yaml
或者使用roslaunch加载地图:1
2<arg name="map_file" default="/home/hlhp/robot_ws/workspace/maps/test.yaml"/>
<node name="map_server" type="map_server" args="$(arg map_file)" pkg="map_server"/>
map_server节点提供的服务:
- static_map (nav_msgs/GetMap):提供检索地图服务
map_server节点读取pgm文件,通过服务static_map将地图数据提供给其他节点。比如move_base节点从中获取地图数据,用来进行路径规划;amcl节点用地图来进行定位,代码在AmclNode::requestMap()
map_server发布的话题包括:1
2/map_metadata (nav_msgs/MapMetaData): 发布地图的描述信息,通过此锁存话题接收地图元数据。
/map (nav_msgs/OccupancyGrid): 通过此锁存话题接收地图
加载yaml文件后,出现下面的结果:
运行rostopic echo map_metadata的结果:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16map_load_time:
secs: 1569549222
nsecs: 440982758
resolution: 0.019999999553
width: 1504
height: 2112
origin:
position:
x: -15.72
y: -12.52
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
echo一下map话题,结果是一大堆-1和0,这就是上面所说的occupancy grid,-1代表未知,0代表无障碍,100代表障碍。
参数:
~frame_id(string, default: “map”):地图坐标系的名称,要在已发布地图的标题中设置的框架, 绑定发布的地图与tf中的哪个frame,通常就是map
问题 1
有时运行rosrun map_server map_saver,结果显示 Wating for the map, 无法保存成功,进程阻塞了
问题 2
有几次,map_server打开pgm时一直阻塞,只能重启ROS1
2
3
4
5map_server::loadMapFromFile(&map_resp_,mapfname.c_str(),res,negate,occ_th,free_th, origin, mode);
ROS_INFO("map_server after loadMapFromFile");
// To make sure get a consistent time in simulation
ros::Time::waitForValid();
经过加日志,发现是 ros::Time::waitForValid();没有执行完,问题出在这里。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18bool Time::waitForValid(const ros::WallDuration& timeout)
{
ros::WallTime start = ros::WallTime::now();
while (!isValid() && !g_stopped)
{
ros::WallDuration(0.01).sleep();
if (timeout > ros::WallDuration(0, 0) && (ros::WallTime::now() - start > timeout))
{
return false;
}
}
if (g_stopped)
{
return false;
}
return true;
}