
平常所说的costmap(代价地图)有下面三层,这三层组合成了master map(最终的costmap),供给路线规划模块使用。: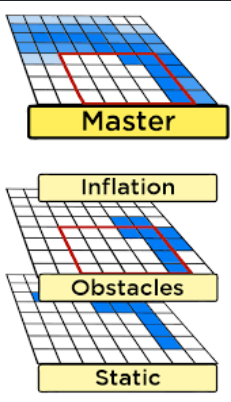
静态层: 为了做全局规划,机器人需要一个超越其传感器的地图,以了解墙壁和其他静态障碍物的位置。 静态地图可以用SLAM算法生成,它表示了costmap中不会变化的大部分
障碍层: 该层从诸如激光和RGB-D相机的高精度传感器收集数据,并将其放置在二维网格中,追踪障碍物。
ObstacleCostmapPlugin在二维层面标记和射线追踪障碍物,theVoxelCostmapPlugin是从三维追踪。膨胀层: 在每个致命障碍周围插入缓冲区,增加到costmap的值取决于离最近的障碍的距离(膨胀半径)。机器人肯定会发生碰撞的地点有致命的代价,而且周围的区域有一些小的非致命的成本。这些值确保机器人不会撞上致命的障碍物,也不愿太靠近
文件夹costmap_2d\plugins提供了这三层和voxel层的源文件,costmap_2d包中的costmap_plugins.xml定义了这几层和VoxelLayer。
我自己定义的障碍物也可以是一层,假如我不想让机器人通过一个freespace就可以自己插入个障碍物,主要的接口是costmap_2d::Costmap2DROS,在每一层中使用pluginlib实例化Costmap2DROS并将每一层添加到LayeredCostmap,各个层可以被独立的编译。写法模仿obstacle_layer.cpp,在CMakeLists里添加后,一起编译成liblayers.so
rotate_recovery, move_base, move_slow_and_clear, global_planner, clear_costmap_recovery(这个库又在move_base中调用), dwa_local_planner, base_local_planner都使用了libcostmap_2d.so这个库
src文件夹中的costmap_2d_markers.cpp, costmap_2d_cloud.cpp, costmap_2d_node.cpp各自编译成一个可执行文件,其余文件联合编译成库文件libcostmap_2d.so
costmap相关的话题和服务
省略每一层和两个代价地图的parameter_descriptions和parameter_updates。以parameter_descriptions 和 parameter_updates结尾的话题用于dynamic_reconfigure机制,不必关注。echo话题会只获得一次消息,几乎不占用带宽,用rostopic bw没有结果。1
2
3
4
5
6
7
8/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/global_costmap/footprint
# 局部代价地图的区别仅仅是没有静态层
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base/local_costmap/footprint/move_base/global_costmap/costmap 的类型是 nav_msgs/OccupancyGrid,所以不能直接订阅,需要转为代价地图.
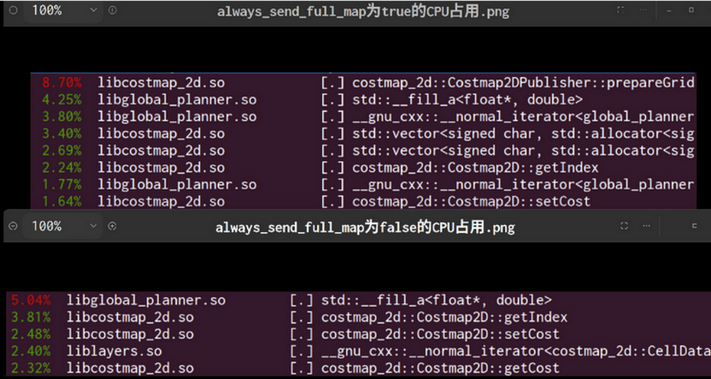
参数~<name>/always_send_full_costmap, (bool, default: false). 如果为true,那么每次更新,完整的costmap都会发布到话题~<name>/costmap. 如果为false, 只有部分 costmap 更新时,会发布到话题 ~<name>/costmap_updates。 设置always_send_full_costmap为false后,带宽大幅减少
话题~<name>/costmap_updates, 类型map_msgs/OccupancyGridUpdate,the value of the updated area of the costmap
除了两个代价地图和每一层的set_parameters服务之外,服务就只有/move_base/clear_costmaps
服务set_parameters是由 Dynamic Parameters server创建,我在导航框架的源码里没找到这个关键词,怀疑它的发布在ROS源码里。
部分源码
move_base里初始化代价地图是使用的Costmap2DROS, move_base里没有直接使用过Costmap2D类的对象1
2
3
4
5
6
7
8
9
10planner_costmap_ros_ = new costmap_2d::Costmap2DROS("global_costmap", tf_);
// 只有两行,类成员变量赋值: stop_updates_ = true; initialized_ = false;
planner_costmap_ros_->pause();
controller_costmap_ros_ = new costmap_2d::Costmap2DROS("local_costmap", tf_);
controller_costmap_ros_->pause();
// 省略... 初始化global_planner local_planner
// 很简单的代码,对各层地图插件调用activate函数,激活各层地图
planner_costmap_ros_->start();
controller_costmap_ros_->start();