
充电桩的导航,一般方案是先导航到充电桩附近的一个固定点,然后切换到另一种更精确的导航方式进行精确对接充电桩。 精确对接的定位技术有红外、蓝牙、激光特征、二维码、反光板
这里只谈Apriltag,如果是aruco二维码,使用aruco_ros
ROS官方提供了一个名为apriltags2_ros的包处理AprilTag,可以根据Tag进行定位导航,我使用的是april.launch。使用前需要先启动摄像头的节点,我用的是usb_cam.launch,如果摄像头程序重启,april.launch也要重启,否则无效。
节点会发布话题tag_detections和tag_detections_image,后者是带数字识别的图,前者是坐标关系的输出。默认的话题频率应该能达到10Hz,但是完全取决于计算机的性能,无法用参数配置。
settings.yaml中的参数如下,按默认即可:
Make sure
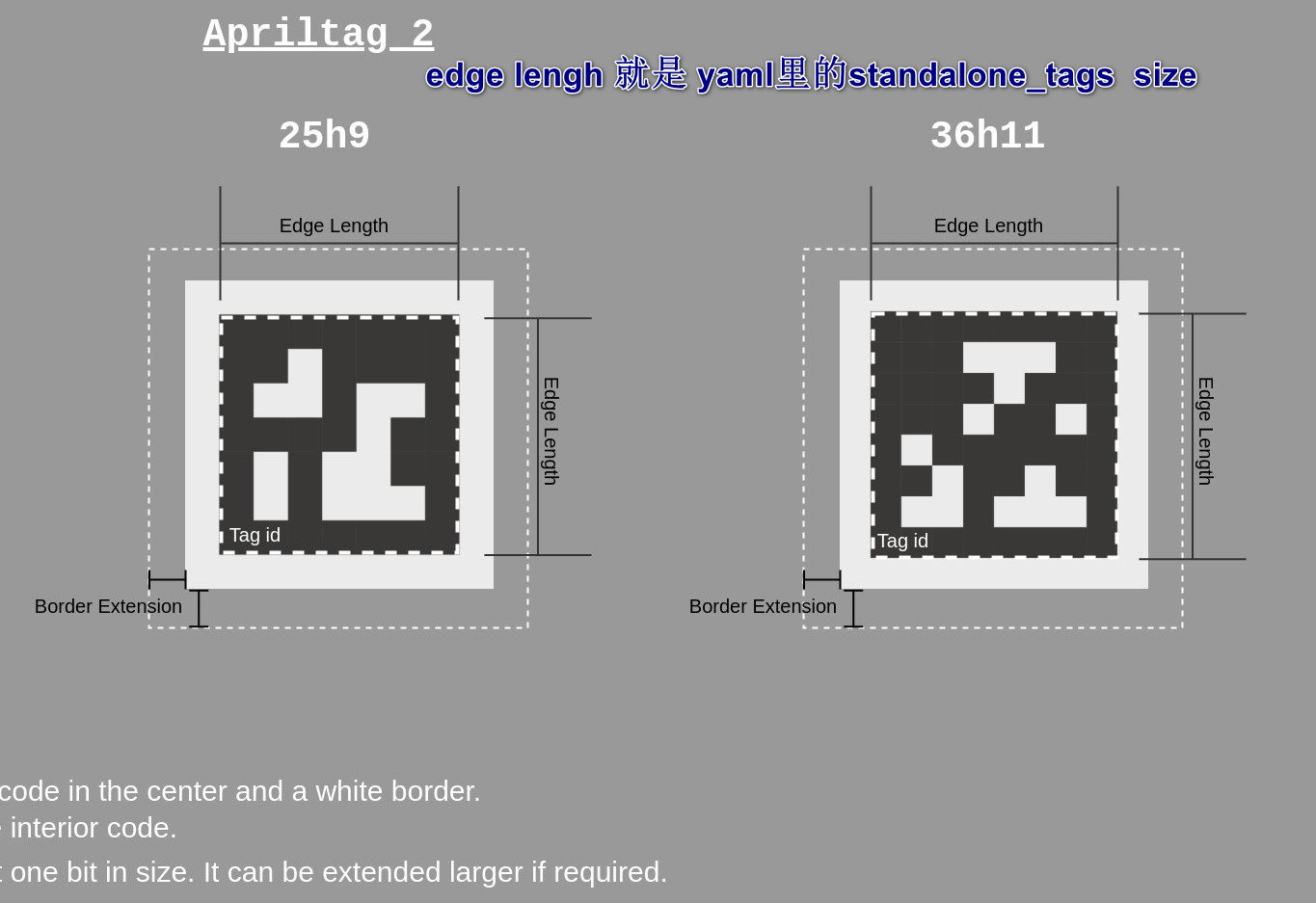
tag_bordercorresponds to your tags’ black border bit width (typically 1 - each square in the tag is represents 1 bit);Setting
tag_threadsallows certain parts of the core AprilTag 2 algorithm to run parallel computations. Typical multithreading advantages and limitations apply;增大
tag_decimate>1allows to decimate (reduce the resolution) of the image by that amount. This makes the core AprilTag 2 algorithm faster (there are less pixels to process) but means that smaller tags are less likely to be detected,甚至无法识别。Pose estimation and decoding still happens with the full-resolution image;Setting
tag_blur>0blurs the image andtag_blur<0sharpens the image;Setting
tag_refine_edges=1improves the detection fit to the tag, thus the corner detection precision, thus the pose estimation accuracy. Not computationally expensive and recommended to be on (1);Setting
tag_refine_decode=1reducecs the false negative detetion rate;Setting
tag_refine_pose=1improves the estimated pose accuracy but is computationally expensive;
这个包有自定义的消息文件,不知道为什么,如果在自己的程序(我的叫tag_nav)中想包含其消息的头文件,就会报错:
解决方法:先编译好apriltag2_ros包,然后注释掉CMakeLists中的generate_messages部分,再编译tag_nav。之后没事不要再动apriltag2_ros了。如果先注释再编译apriltag2_ros包,会无法在tag_nav中包含前者的头文件。
我们使用36H11规格的ID为9的二维码进行测试。
注意事项:
同一个tag ID不能对应不同的尺寸,这会造成检测的不确定。
同一张图案里不要有相同的tag ID
standalone_tags 和 in tag_bundles 可以有相同ID的tag, 但是size也必须相同。
打印出的tags周围要有一些白色空间,这是AprilTag 2 算法要求的,所以我们最好使用带黑框的图案
两话题不同步的问题
运行后提示 image消息和camera_info消息没有同步
此时打开rqt,切换到主题tag_detections_image,发现没有结果
源码在continuous_detector.cpp,发现没有进入回调函数ContinuousDetector::imageCallback,它的注册在:1
camera_image_subscriber_ = it_->subscribeCamera("/usb_cam/image_raw", 1, &ContinuousDetector::imageCallback, this);
函数解释:订阅一对同步化的image和camera info话题,This version assumes the standard topic naming scheme, where the info topic is named “camera_info” in the same namespace as the base image topic.
既然二者目前没有同步,当然没有进入回调函数,也就无法识别Tag了。最终发现原因就是在工控机上运行了roslaunch usb_cam usb_cam.launch,而在远程机运行了apriltag_ros包,而两台电脑通信不畅,解决方法就是将二者都在工控机上运行。
现在执行rqt就可以看到识别的结果了,二维码中心是ID,终端上也出现了二维码ID等信息:
Tag的位姿
若要查看检测结果,执行:1
rostopic echo /tag_detections
得到这样的结果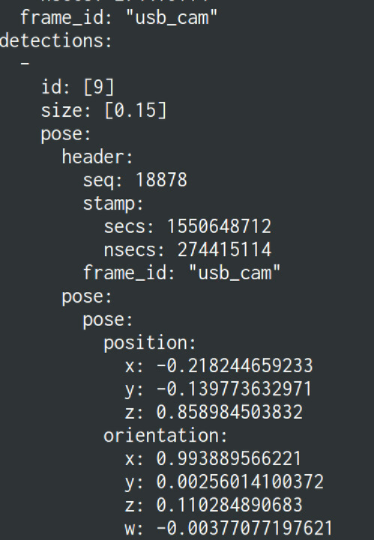
很明显,我们需要的是position和orientation。在实际中,Tag应当是不动的,摄像头安装在机器人上,是运动的。所以描述二者关系时,以Tag为原点进行分析,如下图是Tag和摄像头(黄圈)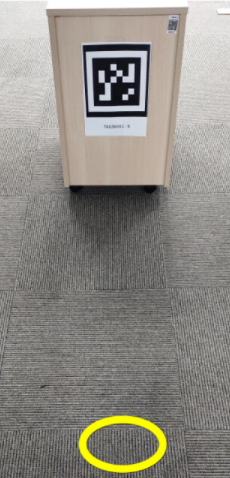
经过我实际的测试,这种环境中的坐标轴应当是这样的:
y代表了上下方向,由于Tag是固定的,而机器人不能飞起来,所以y可以不用考虑。当机器人在Tag右边时,x为负,在左边时为正。当机器人远离Tag时,z值变大,走近Tag时,z值变小。我所用的摄像头检测到Tag的最大距离接近5米,已经足够了。
总结一下,摄像头坐标系和tag坐标系的关系如下(普遍适用):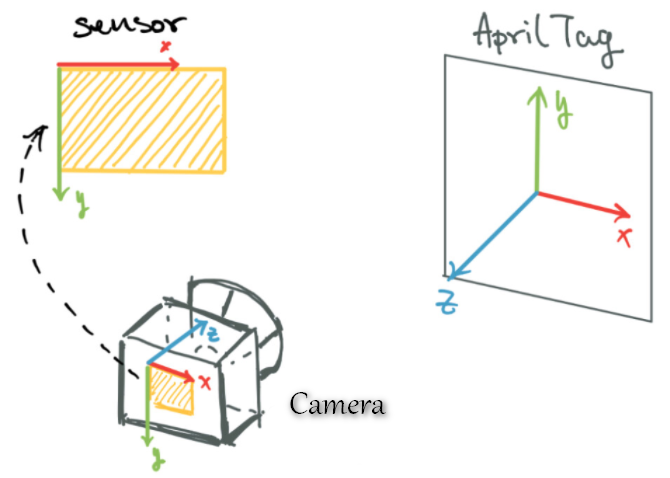
坐标系转换关系问题
apriltag2_ros包存在tag_9坐标系向camera坐标系的转换,在TagDetector::detectTags函数的最后。
接下来我们要在camera和base_link之间建立联系,这样就将所有坐标系关联起来了,在launch文件中添加:1
<node args="-0.24 0 0.295 1.571 0 -1.571 /base_link /camera 10" pkg="tf" name="base_link_to_camera" type="static_transform_publisher"/>
因为tf是树结构,所以一个坐标系只能有一个parent,但可以有多个child。因此这里不能让camera做parent,而是base_link,因为base_link的parent已经是odom了,不能再给它找个parent
启动所有launch文件后,使用rosrun tf view_frame命令生成pdf文件,查看得知,拥有全部坐标系的情况是这样的:
apriltags2_ros的bug
在apriltags2_ros启动一段时间后,会偶然的无法正常检测二维码,tag_detections话题没有结果,也没有图形识别的结果,但摄像头的节点正常。
多次观察tag_detections的发布情况,发现最快的一次是header.seq到1400的时候就出错了,有时是到3900的时候,始终不确定,难以找到原因。
因此尝试AprilTag3,同时把setting.yaml中的线程数改为4,再也没有发生这一bug
参考:
ROS image_transport
Using Apriltags with ROS
image_transport::CameraSubscriber Class